Radar
Definición


El radar es un sistema de detección de objetos que usa ondas de radio para determinar el alcance, el ángulo o la velocidad de los objetos. Se puede usar para detectar aviones, barcos, naves espaciales, misiles guiados, vehículos de motor, formaciones meteorológicas y terreno. Un sistema de radar consiste en un transmisor que produce ondas electromagnéticas en el dominio de la radio o microondas, una antena transmisora, una antena receptora (a menudo la misma antena se usa para transmitir y recibir) y un receptor y procesador para determinar las propiedades de los objetos . Las ondas de radio (pulsadas o continuas) del transmisor se reflejan en el objeto y regresan al receptor, dando información sobre la ubicación y la velocidad del objeto.
Radar fue desarrollado secretamente para uso militar por varias naciones en el período anterior y posterior a la Segunda Guerra Mundial. Un desarrollo clave fue el magnetrón de cavidad en el Reino Unido, que permitió la creación de sistemas relativamente pequeños con una resolución por debajo del metro. El término RADAR fue acuñado en 1940 por la Marina de los Estados Unidos como un acrónimo de RA dio D etection A nd R anging o RA dio D irection A nd R anging. Desde entonces, el término radar ha ingresado al inglés y a otros idiomas como un nombre común, perdiendo toda capitalización.
Los usos modernos del radar son muy diversos, incluidos el control del tráfico aéreo y terrestre, la astronomía radar, los sistemas de defensa aérea, antimisiles, radares marinos para localizar hitos y otros buques, sistemas de anticolisión de aeronaves, sistemas de vigilancia oceánica, vigilancia del espacio ultraterrestre y sistemas de encuentro. monitoreo de precipitación meteorológica, altimetría y sistemas de control de vuelo, sistemas de localización de objetivos de misiles guiados, radar de penetración en el suelo para observaciones geológicas y radar controlado por rango para la vigilancia de la salud pública. Los sistemas de radar de alta tecnología están asociados con el procesamiento de señal digital, el aprendizaje automático y son capaces de extraer información útil de niveles de ruido muy altos.
Otros sistemas similares al radar hacen uso de otras partes del espectro electromagnético. Un ejemplo es "lidar", que utiliza predominantemente luz infrarroja de los láseres en lugar de ondas de radio.
Historia
Primeros experimentos
Ya en 1886, el físico alemán Heinrich Hertz demostró que las ondas de radio podían reflejarse a partir de objetos sólidos. En 1895, Alexander Popov, instructor de física en la escuela de la Armada Imperial de Rusia en Kronstadt, desarrolló un aparato que utilizaba un tubo coherente para detectar rayos distantes. Al año siguiente, agregó un transmisor de chispa. En 1897, mientras probaba este equipo para comunicarse entre dos barcos en el Mar Báltico, tomó nota de un golpe de interferencia causado por el paso de un tercer barco. En su informe, Popov escribió que este fenómeno podría usarse para detectar objetos, pero no hizo nada más con esta observación.
El inventor alemán Christian Hülsmeyer fue el primero en usar ondas de radio para detectar "la presencia de objetos metálicos distantes". En 1904, demostró la viabilidad de detectar un barco en niebla densa, pero no su distancia del transmisor. Obtuvo una patente para su dispositivo de detección en abril de 1904 y más tarde una patente para una enmienda relacionada para estimar la distancia al barco. También obtuvo una patente británica el 23 de septiembre de 1904 para un sistema de radar completo, que llamó un telemoviloscopio . Funcionó en una longitud de onda de 50 cm y la señal de radar pulsado se creó a través de un chispazo. Su sistema ya usaba la configuración de antena clásica de antena de cuerno con reflector parabólico y fue presentado a los oficiales militares alemanes en pruebas prácticas en el puerto de Cologneand Rotterdam, pero fue rechazado.
En 1915, Robert Watson-Watt utilizó la tecnología de radio para advertir con anticipación a los aviadores y durante la década de 1920 llevó al establecimiento de investigación del Reino Unido a hacer muchos avances usando técnicas de radio, incluyendo el sondeo de la ionosfera y la detección de rayos a largas distancias. . A través de sus experimentos con rayos, Watson-Watt se convirtió en un experto en el uso del hallazgo de la dirección de radio antes de pasar su investigación a la transmisión de onda corta. Requiriendo un receptor adecuado para tales estudios, le dijo al "nuevo muchacho" Arnold Frederic Wilkins que condujera una extensa revisión de las unidades de onda corta disponibles. Wilkins seleccionaría un modelo de la Oficina Postal General después de anotar la descripción de su manual de un efecto de "desvanecimiento" (el término común para la interferencia en ese momento) cuando la aeronave voló sobre su cabeza.
Al otro lado del Atlántico en 1922, después de colocar un transmisor y receptor en lados opuestos del río Potomac, los investigadores de la Armada de los Estados Unidos A. Hoyt Taylor y Leo C. Young descubrieron que los barcos que pasaban por la trayectoria del haz causaban que la señal recibida se desvaneciera. Taylor presentó un informe, sugiriendo que este fenómeno podría usarse para detectar la presencia de barcos en baja visibilidad, pero la Marina no continuó el trabajo de inmediato. Ocho años más tarde, Lawrence A. Hyland en el Naval Research Laboratory (NRL) observó efectos de desvanecimiento similares a los de los aviones que pasaban; esta revelación condujo a una solicitud de patente, así como a una propuesta para una mayor investigación intensiva sobre las señales de eco de radio de los objetivos en movimiento que se llevarían a cabo en NRL, donde se basaron Taylor y Young en ese momento.
Justo antes de la Segunda Guerra Mundial

Antes de la Segunda Guerra Mundial, investigadores en el Reino Unido, Francia, Alemania, Italia, Japón, los Países Bajos, la Unión Soviética y los Estados Unidos, de manera independiente y en gran secreto, desarrollaron tecnologías que condujeron a la versión moderna del radar. Australia, Canadá, Nueva Zelanda y Sudáfrica siguieron el desarrollo de radares de Gran Bretaña antes de la guerra, y Hungría generó su tecnología de radar durante la guerra.
En Francia en 1934, siguiendo estudios sistemáticos sobre el magnetrón de ánodo dividido, la rama de investigación de la Compagnie Générale de Télégraphie Sans Fil (CSF) dirigida por Maurice Ponte con Henri Gutton, Sylvain Berline y M. Hugon, comenzó a desarrollar una localización de obstáculos. aparatos de radio, aspectos de los cuales fueron instalados en el transatlántico Normandie en 1935.
Durante el mismo período, el ingeniero militar soviético PK Oshchepkov, en colaboración con el Instituto de Electrofísica de Leningrado, produjo un aparato experimental, RAPID, capaz de detectar un avión a 3 km de un receptor. Los soviéticos produjeron sus primeros radares de producción en masa RUS-1 y RUS-2 Redut en 1939, pero su desarrollo se ralentizó luego del arresto de Oshchepkov y su posterior sentencia de gulag. En total, solo se produjeron 607 estaciones de Redut durante la guerra. El primer radar aerotransportado ruso, Gneiss-2, entró en servicio en junio de 1943 con cazas Pe-2. Más de 230 estaciones Gneiss-2 se produjeron a finales de 1944. Los sistemas franceses y soviéticos, sin embargo, presentaron la operación de onda continua que no proporcionó el rendimiento completo en última instancia, sinónimo de sistemas de radar modernos.
El radar completo evolucionó como un sistema pulsado, y el primer aparato elemental de ese tipo fue demostrado en diciembre de 1934 por el estadounidense Robert M. Page, que trabajaba en el Laboratorio de Investigación Naval. El año siguiente, el ejército de los Estados Unidos probó con éxito un primitivo radar de superficie a superficie para apuntar a las luces de búsqueda de baterías costeras durante la noche. Este diseño fue seguido por un sistema pulsado demostrado en mayo de 1935 por Rudolf Kühnhold y la firma GEMA en Alemania y luego otro en junio de 1935 por un equipo del Ministerio del Aire dirigido por Robert A. Watson-Watt en Gran Bretaña.



En 1935, se le pidió a Watson-Watt que juzgara los informes recientes de un rayo de la muerte basado en la radio alemana y entregó la solicitud a Wilkins. Wilkins devolvió una serie de cálculos que demostraban que el sistema era básicamente imposible. Cuando Watson-Watt preguntó qué podría hacer tal sistema, Wilkins recordó el informe anterior sobre aeronaves que causaba interferencia de radio. Esta revelación llevó al Daventry Experiment del 26 de febrero de 1935, utilizando un poderoso transmisor de onda corta de la BBC como fuente y su receptor de GPO configurado en un campo mientras un bombardero volaba alrededor del sitio. Cuando el avión fue detectado claramente, Hugh Dowding, el miembro aéreo de suministro e investigación quedó muy impresionado con el potencial de su sistema y se proporcionaron fondos inmediatamente para un mayor desarrollo operacional. El equipo de Watson-Watt patentó el dispositivo en GB593017.
El desarrollo del radar se expandió enormemente el 1 de septiembre de 1936 cuando Watson-Watt se convirtió en el superintendente de un nuevo establecimiento dependiente del Ministerio Británico del Aire, Bawdsey Research Station ubicado en Bawdsey Manor, cerca de Felixstowe, Suffolk. El trabajo dio como resultado el diseño e instalación de estaciones de detección y rastreo de aeronaves llamadas "Chain Home" a lo largo de las costas este y sur de Inglaterra a tiempo para el estallido de la Segunda Guerra Mundial en 1939. Este sistema proporcionó la vital información anticipada que ayudó al Royal La Fuerza Aérea gana la Batalla de Inglaterra; sin él, un número significativo de aviones de combate siempre necesitaría estar en el aire para responder con la suficiente rapidez si la detección de aeronaves enemigas dependiera únicamente de las observaciones de individuos terrestres. También fue vital el "sistema Dowding"
Dado todo el financiamiento requerido y el apoyo al desarrollo, el equipo produjo sistemas de radar en funcionamiento en 1935 y comenzó el despliegue. En 1936, los primeros cinco sistemas Chain Home (CH) estaban en funcionamiento y en 1940 se extendieron por todo el Reino Unido, incluida Irlanda del Norte. Incluso para los estándares de la época, CH era crudo; en lugar de transmitir y recibir desde una antena dirigida, CH emitió una señal que iluminaba toda el área frente a ella, y luego usó uno de los buscadores de dirección por radio de Watson-Watt para determinar la dirección de los ecos devueltos. Este hecho significó que los transmisores de CH tuvieron que ser mucho más potentes y tener mejores antenas que los sistemas de la competencia, pero permitieron su introducción rápida utilizando las tecnologías existentes.
Durante la Segunda Guerra Mundial
Un desarrollo clave fue el magnetrón de cavidad en el Reino Unido, que permitió la creación de sistemas relativamente pequeños con una resolución por debajo del metro. Gran Bretaña compartió la tecnología con los EE. UU. Durante la Misión Tizard de 1940.
En abril de 1940, Popular Science mostró un ejemplo de una unidad de radar que usaba la patente de Watson-Watt en un artículo sobre defensa aérea. Además, a fines de 1941, Popular Mechanics tenía un artículo en el que un científico estadounidense especulaba sobre el sistema de alerta temprana británico en la costa este inglesa y se acercaba a lo que era y cómo funcionaba. Watson-Watt fue enviado a los EE. UU. En 1941 para asesorar sobre defensa aérea después del ataque de Japón contra Pearl Harbor. Alfred Lee Loomis organizó el Laboratorio de Radiación en Cambridge, Massachusetts, que desarrolló la tecnología en los años 1941-45. Más tarde, en 1943, Page mejoró mucho el radar con la técnica de monopulso que se usó durante muchos años en la mayoría de las aplicaciones de radar.
La guerra precipitó la investigación para encontrar una mejor resolución, más portabilidad y más características para el radar, incluidos los sistemas de navegación complementarios como Oboe utilizados por el Pathfinder de la RAF.
Aplicaciones

La información proporcionada por el radar incluye el rumbo y el alcance (y por lo tanto la posición) del objeto del escáner de radar. Por lo tanto, se usa en muchos campos diferentes donde la necesidad de tal posicionamiento es crucial. El primer uso del radar fue para fines militares: localizar objetivos aéreos, terrestres y marítimos. Esto evolucionó en el campo civil en aplicaciones para aviones, barcos y carreteras.
En la aviación, los aviones pueden estar equipados con dispositivos de radar que advierten de la presencia de aeronaves u otros obstáculos en su camino o se acercan a ellos, muestran información meteorológica y dan lecturas de altitud precisas. El primer dispositivo comercial instalado en una aeronave fue una unidad Bell Lab de 1938 en algunas naves de United Air Lines. Las aeronaves pueden aterrizar en niebla en aeropuertos equipados con sistemas de aproximación controlados por tierra asistidos por radar en los que la posición del avión es observada en pantallas de radar por operadores que transmiten instrucciones de aterrizaje al piloto, manteniendo el avión en un camino de aproximación definido a la pista. Los aviones de combate militares generalmente están equipados con radares de ataque aéreo-aéreo, para detectar y apuntar a los aviones enemigos. En adición,
Los radares marinos se utilizan para medir el rumbo y la distancia de los buques para evitar colisiones con otros buques, para navegar y para fijar su posición en el mar cuando se encuentran dentro del alcance de la costa u otras referencias fijas como islas, boyas y naves luminosas. En el puerto o en el puerto, los sistemas de radar del servicio de tráfico de buques se utilizan para controlar y regular los movimientos de los buques en aguas concurridas.
Los meteorólogos usan el radar para controlar la precipitación y el viento. Se ha convertido en la principal herramienta para pronosticar el clima a corto plazo y observar el clima severo, como tormentas eléctricas, tornados, tormentas de invierno, tipos de precipitación, etc. Los geólogos utilizan radares de penetración terrestres especializados para mapear la composición de la corteza terrestre. Las fuerzas policiales usan pistolas de radar para controlar las velocidades de los vehículos en las carreteras. Se usan sistemas de radar más pequeños para detectar el movimiento humano. Algunos ejemplos son la detección de patrones de respiración para el monitoreo del sueño y la detección de gestos con las manos y los dedos para la interacción de la computadora. La apertura automática de la puerta, la activación de la luz y la detección del intruso también son comunes.
Principios
Señal de radar
Un sistema de radar tiene un transmisor que emite ondas de radio llamadas señales de radar en direcciones predeterminadas. Cuando entran en contacto con un objeto, generalmente se reflejan o dispersan en muchas direcciones. Pero algunos de ellos absorben y penetran en el objetivo hasta cierto punto. Las señales de radar se reflejan especialmente bien con materiales de considerable conductividad eléctrica, especialmente en la mayoría de los metales, en el agua de mar y en el suelo húmedo. Algunos de estos hacen posible el uso de altímetros de radar. Las señales de radar que se reflejan hacia el transmisor son las deseables que hacen que el radar funcione. Si el objeto se mueve hacia o desde el transmisor, hay un ligero cambio equivalente en la frecuencia de las ondas de radio, causado por el efecto Doppler.
Los receptores de radar suelen estar, pero no siempre, en la misma ubicación que el transmisor. Aunque las señales de radar reflejadas capturadas por la antena receptora suelen ser muy débiles, pueden reforzarse con amplificadores electrónicos. También se utilizan métodos más sofisticados de procesamiento de señales para recuperar señales de radar útiles.
La débil absorción de ondas de radio por el medio a través del cual pasa es lo que permite a los conjuntos de radar detectar objetos a rangos relativamente largos, rangos en los que otras longitudes de onda electromagnéticas, como luz visible, luz infrarroja y luz ultravioleta, están demasiado atenuadas. Los fenómenos meteorológicos tales como la niebla, las nubes, la lluvia, la nieve que cae y el aguanieve que bloquean la luz visible suelen ser transparentes para las ondas de radio. Ciertas frecuencias de radio que son absorbidas o dispersadas por el vapor de agua, gotas de lluvia o gases atmosféricos (especialmente oxígeno) se evitan en el diseño de radares, excepto cuando se pretende su detección.
Iluminación
El radar depende de sus propias transmisiones en lugar de la luz del Sol o la Luna, o de las ondas electromagnéticas emitidas por los propios objetos, como las longitudes de onda infrarrojas (calor). Este proceso de dirigir ondas de radio artificiales hacia los objetos se denomina iluminación , aunque las ondas de radio son invisibles para el ojo humano o las cámaras ópticas.
Reflexión
Si las ondas electromagnéticas que viajan a través de un material se encuentran con otro material, teniendo una constante dieléctrica o constante diamagnética diferente de la primera, las ondas se reflejarán o se dispersarán desde el límite entre los materiales. Esto significa que un objeto sólido en el aire o en el vacío, o un cambio significativo en la densidad atómica entre el objeto y lo que lo rodea, generalmente dispersará las ondas de radar (radio) de su superficie. Esto es particularmente cierto para los materiales eléctricamente conductores como el metal y la fibra de carbono, lo que hace que el radar sea adecuado para la detección de aeronaves y barcos. El material absorbente del radar, que contiene sustancias resistivas y a veces magnéticas, se utiliza en vehículos militares para reducir la reflexión del radar. Este es el equivalente radial de pintar algo de un color oscuro para que no pueda ser visto por el ojo por la noche.
Las ondas de radar se dispersan en una variedad de formas dependiendo del tamaño (longitud de onda) de la onda de radio y la forma del objetivo. Si la longitud de onda es mucho más corta que el tamaño del objetivo, la onda rebotará de forma similar a como se refleja la luz en un espejo. Si la longitud de onda es mucho más larga que el tamaño del objetivo, el objetivo puede no ser visible debido a la mala reflexión. La tecnología de radar de baja frecuencia depende de las resonancias para la detección, pero no la identificación, de los objetivos. Esto se describe mediante la dispersión de Rayleigh, un efecto que crea el cielo azul de la Tierra y los atardeceres rojos. Cuando las dos escalas de longitud son comparables, puede haber resonancias. Los primeros radares usaban longitudes de onda muy largas que eran más grandes que los objetivos y, por lo tanto, recibían una señal vaga,
Las ondas de radio cortas se reflejan desde curvas y esquinas de una manera similar al destello de una pieza de vidrio redondeada. Los objetivos más reflectantes para longitudes de onda cortas tienen ángulos de 90 ° entre las superficies reflectantes. Un reflector de esquina consiste en tres superficies planas que se encuentran como la esquina interior de una caja. La estructura reflejará las ondas que entran en su abertura directamente de regreso a la fuente. Se usan comúnmente como reflectores de radar para facilitar la detección de objetos difíciles de detectar. Los reflectores de esquina en barcos, por ejemplo, los hacen más detectables para evitar colisiones o durante un rescate. Por motivos similares, los objetos destinados a evitar la detección no tendrán las esquinas interiores o las superficies y los bordes perpendiculares a las posibles direcciones de detección, lo que conduce a una aeronave sigilosa de aspecto "extraño". Estas precauciones no eliminan por completo la reflexión debido a la difracción, especialmente a longitudes de onda más largas. Los cables de longitud de media longitud de onda o tiras de material conductor, como la paja, son muy reflectantes pero no dirigen la energía dispersa hacia la fuente. El grado en que un objeto refleja o dispersa las ondas de radio se denomina sección transversal de radar.
Ecuación del radar
La potencia P r que vuelve a la antena receptora viene dada por la ecuación:

dónde
- P t = potencia del transmisor
- G t = ganancia de la antena transmisora
- A r = abertura (área) efectiva de la antena receptora; esto también se puede expresar como , donde

- = longitud de onda transmitida
- G r = ganancia de la antena receptora

- σ = sección transversal de radar, o coeficiente de dispersión, del objetivo
- F = factor de propagación del patrón
- R t = distancia desde el transmisor al objetivo
- R r = distancia del objetivo al receptor.
En el caso común donde el transmisor y el receptor están en el mismo lugar, R t = R r y el término R t ² R r ² puede ser reemplazado por R , donde R es el rango. Esto produce:

Esto muestra que la potencia recibida disminuye como la cuarta potencia del rango, lo que significa que la potencia recibida de los objetivos distantes es relativamente muy pequeña.
El filtrado adicional y la integración de pulsos modifican ligeramente la ecuación del radar para el rendimiento del radar de pulso-Doppler, que se puede utilizar para aumentar el alcance de detección y reducir la potencia de transmisión.
La ecuación anterior con F = 1 es una simplificación para la transmisión en vacío sin interferencia. El factor de propagación tiene en cuenta los efectos de multitrayectoria y sombreado y depende de los detalles del entorno. En una situación del mundo real, también se deben considerar los efectos de pérdida de ruta.
efecto Doppler
El desplazamiento de frecuencia es causado por un movimiento que cambia el número de longitudes de onda entre el reflector y el radar. Esto puede degradar o mejorar el rendimiento del radar dependiendo de cómo afecta el proceso de detección. Como ejemplo, Moving Target Indication puede interactuar con Doppler para producir la cancelación de señal a ciertas velocidades radiales, lo que degrada el rendimiento.
Los sistemas de radar basados en el mar, el rastreo de radar semiactivo, el rastreo de radar activo, el radar meteorológico, el avión militar y la astronomía de radar se basan en el efecto Doppler para mejorar el rendimiento. Esto produce información sobre la velocidad objetivo durante el proceso de detección. Esto también permite que se detecten objetos pequeños en un entorno que contiene objetos mucho más lentos y cercanos.
El desplazamiento Doppler depende de si la configuración del radar es activa o pasiva. El radar activo transmite una señal que se refleja de vuelta al receptor. El radar pasivo depende del objeto que envía una señal al receptor.
El cambio de frecuencia Doppler para radar activo es el siguiente, donde la frecuencia Doppler es la frecuencia de transmisión, la velocidad radial y la velocidad de la luz:




- .

El radar pasivo es aplicable a contramedidas electrónicas y radioastronomía de la siguiente manera:
- .

Solo la componente radial de la velocidad es relevante. Cuando el reflector se mueve en ángulo recto al haz del radar, no tiene velocidad relativa. Los vehículos y el clima que se mueve en paralelo al rayo del radar producen el desplazamiento de frecuencia Doppler máximo.
Cuando la frecuencia de transmisión ( ) se pulsa, utilizando una frecuencia de repetición de pulso , el espectro de frecuencia resultante contendrá frecuencias armónicas por encima y por debajo con una distancia de . Como resultado, la medición Doppler solo no es ambigua si el desplazamiento de frecuencia Doppler es menor que la mitad , llamada frecuencia Nyquist, ya que la frecuencia devuelta no se puede distinguir del desplazamiento de una frecuencia armónica por encima o por debajo, lo que requiere:


O al sustituir con :

Como ejemplo, un radar meteorológico Doppler con una frecuencia de pulso de 2 kHz y frecuencia de transmisión de 1 GHz puede medir confiablemente la velocidad del clima hasta un máximo de 150 m / s (340 mph), por lo tanto no puede determinar confiablemente la velocidad radial del avión moviéndose 1,000 m / s (2,200 mph).
Polarización
En toda radiación electromagnética, el campo eléctrico es perpendicular a la dirección de propagación, y la dirección del campo eléctrico es la polarización de la onda. Para una señal de radar transmitida, la polarización se puede controlar para producir diferentes efectos. Los radares usan polarización horizontal, vertical, lineal y circular para detectar diferentes tipos de reflejos. Por ejemplo, la polarización circular se usa para minimizar la interferencia causada por la lluvia. Los retornos de polarización lineal generalmente indican superficies metálicas. Los retornos de polarización aleatoria generalmente indican una superficie fractal, como rocas o suelo, y son utilizados por los radares de navegación.
Factores limitantes
Haz y rango de haz
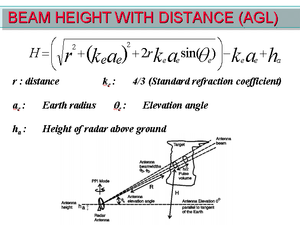
El rayo de radar seguiría un camino lineal en el vacío, pero realmente sigue un camino algo curvado en la atmósfera debido a la variación del índice de refracción del aire, que se denomina horizonte de radar. Incluso cuando el rayo se emite paralelo al suelo, se elevará por encima de él a medida que la curvatura de la Tierra se hunde debajo del horizonte. Además, la señal se atenúa por el medio que cruza, y el haz se dispersa.
El alcance máximo de un radar convencional puede estar limitado por una serie de factores:
- Línea de visión, que depende de la altura sobre el suelo. Esto significa que sin una línea de visión directa, el camino del rayo está bloqueado.
- El rango máximo no ambiguo, que está determinado por la frecuencia de repetición de pulsos. El rango máximo no ambiguo es la distancia que el pulso podría viajar y regresar antes de que se emita el próximo pulso.
- La sensibilidad del radar y la potencia de la señal de retorno calculada en la ecuación del radar. Esto incluye factores tales como las condiciones ambientales y el tamaño (o la sección transversal del radar) del objetivo.
ruido
El ruido de la señal es una fuente interna de variaciones aleatorias en la señal, que es generada por todos los componentes electrónicos.
Las señales reflejadas disminuyen rápidamente a medida que aumenta la distancia, por lo que el ruido introduce una limitación del alcance del radar. El piso de ruido y la relación señal / ruido son dos medidas de rendimiento diferentes que afectan el rendimiento del rango. Los reflectores que están demasiado lejos producen muy poca señal para superar el nivel de ruido y no se pueden detectar. La detección requiere una señal que exceda el nivel mínimo de ruido por al menos la relación señal / ruido.
El ruido típicamente aparece como variaciones aleatorias superpuestas a la señal de eco deseada recibida en el receptor de radar. Cuanto menor sea el poder de la señal deseada, más difícil será discernirlo del ruido. La figura de ruido es una medida del ruido producido por un receptor en comparación con un receptor ideal, y esto debe minimizarse.
El ruido de disparo es producido por electrones en tránsito a través de una discontinuidad, que ocurre en todos los detectores. El ruido de disparo es la fuente dominante en la mayoría de los receptores. También habrá un parpadeo causado por el tránsito de electrones a través de los dispositivos de amplificación, que se reduce con la amplificación heterodina. Otra razón para el procesamiento heterodino es que para el ancho de banda fraccional fijo, el ancho de banda instantáneo aumenta linealmente en frecuencia. Esto permite una resolución de rango mejorada. La única excepción notable a los sistemas de radar heterodinos (downconversion) es ultrabajabandradar. Aquí se usa un ciclo único, o onda transitoria, similar a las comunicaciones UWB, ver Lista de canales UWB.
El ruido también es generado por fuentes externas, lo más importante es la radiación térmica natural del fondo que rodea al objetivo de interés. En los sistemas de radar modernos, el ruido interno suele ser igual o menor que el ruido externo. Una excepción es si el radar apunta hacia arriba en un cielo despejado, donde la escena es tan "fría" que genera muy poco ruido térmico. El ruido térmico viene dado por k B TB , donde T es la temperatura, B es el ancho de banda (post filtro adaptado) y k B es la constante de Boltzmann. Hay una interpretación intuitiva atractiva de esta relación en un radar. El filtrado combinado permite que toda la energía recibida de un objetivo se comprima en un solo contenedor (ya sea un rango, Doppler, elevación o depósito de azimut). En la superficie, parece que dentro de un intervalo de tiempo fijo se puede obtener una detección perfecta, libre de errores. Para hacer esto, simplemente comprime toda la energía en un segmento de tiempo infinitesimal. Lo que limita este enfoque en el mundo real es que, aunque el tiempo es arbitrariamente divisible, la corriente no lo es. La cantidad de energía eléctrica es un electrón, por lo que lo mejor que se puede hacer es filtrar toda la energía en un solo electrón. Como el electrón se mueve a una temperatura determinada (espectro de Plank), esta fuente de ruido no se puede erosionar aún más. Vemos entonces ese radar,
El ruido es aleatorio y las señales de destino no lo son. El procesamiento de señal puede aprovechar este fenómeno para reducir el ruido de fondo utilizando dos estrategias. El tipo de integración de señal utilizada con la indicación de objetivo en movimiento puede mejorar el ruido hasta en cada etapa. La señal también se puede dividir entre múltiples filtros para el procesamiento de la señal de pulso-Doppler, que reduce el ruido de fondo por el número de filtros. Estas mejoras dependen de la coherencia.

Interferencia
Los sistemas de radar deben superar las señales no deseadas para centrarse en los objetivos de interés. Estas señales no deseadas pueden originarse a partir de fuentes internas y externas, tanto pasivas como activas. La capacidad del sistema de radar para superar estas señales no deseadas define su relación señal / ruido (SNR). SNR se define como la relación entre la potencia de señal y la potencia de ruido dentro de la señal deseada; compara el nivel de una señal objetivo deseada con el nivel de ruido de fondo (ruido atmosférico y ruido generado dentro del receptor). Cuanto mayor sea la SNR de un sistema, mejor será para discriminar los objetivos reales de las señales de ruido.
Desorden
Clutter se refiere a los ecos de radiofrecuencia (RF) devueltos por objetivos que no interesan a los operadores de radar. Dichos objetivos incluyen objetos naturales como el suelo, el mar y cuando no se les asignan tareas meteorológicas, precipitación (como lluvia, nieve o granizo), tormentas de arena, animales (especialmente aves), turbulencia atmosférica y otros efectos atmosféricos, como reflexiones ionosféricas, senderos de meteoritos y pico de granizo. El desorden también puede ser devuelto por objetos hechos por el hombre tales como edificios e, intencionalmente, por contramedidas de radar como la paja.
Algunos ecos parásitos también pueden ser causados por una larga guía de ondas de radar entre el transceptor de radar y la antena. En un radar de indicador de posición plan (PPI) típico con una antena giratoria, esto generalmente se verá como un "sol" o "resplandor solar" en el centro de la pantalla cuando el receptor responde a ecos de partículas de polvo y RF mal guiada en la guía de onda . Ajustar el tiempo entre cuando el transmisor envía un pulso y cuando la etapa del receptor está habilitada generalmente reducirá el estallido solar sin afectar la precisión del rango, ya que la mayoría de los rayos solares son causados por un impulso de transmisión difusa reflejado antes de que salga de la antena. El desorden se considera una fuente de interferencia pasiva, ya que solo aparece en respuesta a las señales de radar enviadas por el radar.
El desorden se detecta y neutraliza de varias maneras. El desorden tiende a parecer estático entre los rastreos de radar; en los ecos de escaneo subsiguientes, los objetivos deseables parecerán moverse, y todos los ecos estacionarios pueden eliminarse. El desorden del mar puede reducirse utilizando la polarización horizontal, mientras que la lluvia se reduce con la polarización circular (los radares meteorológicos desean el efecto contrario, y por lo tanto usan polarización lineal para detectar la precipitación). Otros métodos intentan aumentar la relación señal / ruido.
El desorden se mueve con el viento o está estacionario. Dos estrategias comunes para mejorar la medida o el rendimiento en un entorno desordenado son:
- Indicación de destino móvil, que integra pulsos sucesivos y
- Procesamiento Doppler, que utiliza filtros para separar el desorden de las señales deseables.
La técnica de reducción de ecos parásitos más efectiva es el radar Doppler de pulso. El Doppler separa el desorden de la aeronave y la nave espacial utilizando un espectro de frecuencia, por lo que las señales individuales se pueden separar de múltiples reflectores ubicados en el mismo volumen utilizando las diferencias de velocidad. Esto requiere un transmisor coherente. Otra técnica utiliza un indicador de objetivo móvil que resta la señal de recepción de dos pulsos sucesivos utilizando la fase para reducir las señales de los objetos que se mueven lentamente. Esto se puede adaptar para sistemas que carecen de un transmisor coherente, como el radar de amplitud de pulso en el dominio del tiempo.
La constante tasa de falsas alarmas, una forma de control automático de ganancia (AGC), es un método que se basa en ecos de ecos parásitos que superan en número a los objetivos de interés. La ganancia del receptor se ajusta automáticamente para mantener un nivel constante de desorden visible en general. Si bien esto no ayuda a detectar objetivos enmascarados por un desorden circundante más fuerte, ayuda a distinguir las fuentes de objetivos fuertes. En el pasado, el AGC del radar se controlaba electrónicamente y afectaba la ganancia de todo el receptor del radar. A medida que evolucionaron los radares, AGC se controló por software de computadora y afectó la ganancia con mayor granularidad en células de detección específicas.

El desorden también puede originarse a partir de ecos multitrayecto procedentes de objetivos válidos causados por la reflexión del suelo, los conductos atmosféricos o la reflexión / refracción ionosférica (por ejemplo, propagación anómala). Este tipo de desorden es especialmente molesto, ya que parece moverse y comportarse como otros objetivos normales (de interés). En un escenario típico, un eco de la aeronave se refleja desde el piso de abajo, apareciendo al receptor como un objetivo idéntico debajo del correcto. El radar puede tratar de unificar los objetivos, informar el objetivo a una altura incorrecta, o eliminarlo sobre la base de la inestabilidad o la inestabilidad física. La interferencia de rebote de terreno explota esta respuesta amplificando la señal de radar y dirigiéndola hacia abajo. Estos problemas se pueden superar incorporando un mapa de tierra del radar ' s alrededor y eliminando todos los ecos que parecen originarse bajo tierra o por encima de cierta altura. Monopulse se puede mejorar alterando el algoritmo de elevación utilizado a baja elevación. En los equipos de radar de control de tráfico aéreo más nuevos, se utilizan algoritmos para identificar los objetivos falsos al comparar los retornos de pulso actuales con los adyacentes, así como calcular las improbabilidades de retorno.
Interferencia
La interferencia de radar se refiere a las señales de radiofrecuencia que se originan en fuentes externas al radar, que transmiten en la frecuencia del radar y enmascaran así los objetivos de interés. La interferencia puede ser intencional, como con una táctica de guerra electrónica, o involuntaria, como con las fuerzas amigas que operan equipos que transmiten usando el mismo rango de frecuencia. La interferencia se considera una fuente de interferencia activa, ya que es iniciada por elementos fuera del radar y, en general, no está relacionada con las señales de radar.
El atasco es problemático para el radar ya que la señal de atasco solo necesita viajar en un sentido (desde el perturbador al receptor del radar) mientras que los ecos del radar viajan de dos maneras (radar-objetivo-radar) y se reducen significativamente en potencia cuando regresan al receptor de radar. Por lo tanto, los Jammers pueden ser mucho menos poderosos que sus radares atascados y aún así enmascarar de manera efectiva los objetivos a lo largo de la línea de visión desde el perturbador al radar ( interferencia del lóbulo principal ). Los bloqueadores tienen un efecto adicional de afectar radares a lo largo de otras líneas de visión a través de los lóbulos laterales del receptor de radar ( interferencia de lóbulos laterales ).
El bloqueo del lóbulo principal generalmente solo se puede reducir estrechando el ángulo sólido del lóbulo principal y no se puede eliminar completamente cuando se enfrenta directamente a un bloqueador que usa la misma frecuencia y polarización que el radar. El bloqueo del lóbulo lateral puede superarse reduciendo la recepción de lóbulos laterales en el diseño de la antena del radar y utilizando una antena omnidireccional para detectar y descartar las señales que no son del lóbulo principal. Otras técnicas anti-interferencia son el salto de frecuencia y la polarización.
Procesamiento de señal de radar
Medida de distancia
Tiempo de tránsito


Una forma de obtener una medición de distancia se basa en el tiempo de vuelo: transmitir un pulso corto de señal de radio (radiación electromagnética) y medir el tiempo que tarda el reflejo en regresar. La distancia es la mitad del producto del tiempo de ida y vuelta (porque la señal debe viajar al objetivo y luego de vuelta al receptor) y la velocidad de la señal. Dado que las ondas de radio viajan cerca de la velocidad de la luz, la medición de distancia precisa requiere electrónica de alta velocidad. En la mayoría de los casos, el receptor no detecta el retorno mientras se transmite la señal. Mediante el uso de un duplexor, el radar cambia entre la transmisión y la recepción a una velocidad predeterminada. Un efecto similar también impone un rango máximo. Para maximizar el rango, se deben usar tiempos más largos entre pulsos, referidos como tiempo de repetición de pulso,
Estos dos efectos tienden a estar en desacuerdo entre sí, y no es fácil combinar tanto el corto alcance bueno como el largo alcance en un solo radar. Esto se debe a que los pulsos cortos necesarios para una buena transmisión de rango mínimo tienen menos energía total, lo que hace que los retornos sean mucho más pequeños y que el objetivo sea más difícil de detectar. Esto podría compensarse usando más pulsos, pero esto acortaría el rango máximo. Entonces cada radar usa un tipo particular de señal. Los radares de largo alcance tienden a usar pulsos largos con largas demoras entre ellos, y los radares de corto alcance usan pulsos más pequeños con menos tiempo entre ellos. A medida que la electrónica ha mejorado, muchos radares ahora pueden cambiar su frecuencia de repetición de pulsos, cambiando así su alcance. Los radares más nuevos disparan dos pulsos durante una celda, uno para corto alcance (aproximadamente 10 km (6.
La resolución de distancia y las características de la señal recibida en comparación con el ruido dependen de la forma del pulso. El pulso a menudo se modula para lograr un mejor rendimiento utilizando una técnica conocida como compresión de pulso.
La distancia también se puede medir como una función del tiempo. La milla de radar es el tiempo que le toma a un pulso de radar viajar una milla náutica, reflejarse en un objetivo y regresar a la antena del radar. Como una milla náutica se define como 1,852 m, dividir esta distancia por la velocidad de la luz (299,792,458 m / s) y luego multiplicar el resultado por 2 produce un resultado de 12,36 μs de duración.
Modulación de frecuencia
Otra forma de radar de medición de distancia se basa en la modulación de frecuencia. La comparación de frecuencia entre dos señales es considerablemente más precisa, incluso con dispositivos electrónicos más antiguos, que la sincronización de la señal. Al medir la frecuencia de la señal devuelta y compararla con la original, la diferencia se puede medir fácilmente.
Esta técnica se puede utilizar en radar de onda continua y a menudo se encuentra en altímetros de radar de aeronaves. En estos sistemas, una señal de radar "portadora" se modula en frecuencia de una manera predecible, variando típicamente hacia arriba y hacia abajo con un patrón de onda sinusoidal o diente de sierra a frecuencias de audio. La señal se envía desde una antena y se recibe en otra, típicamente ubicada en la parte inferior de la aeronave, y la señal se puede comparar continuamente usando un modulador de frecuencia de batido simple que produce un tono de frecuencia de audio de la señal devuelta y una porción de la señal transmitida.
Dado que la frecuencia de la señal está cambiando, en el momento en que la señal regresa a la aeronave, la frecuencia de transmisión ha cambiado. El cambio de frecuencia se usa para medir la distancia.
El índice de modulación montado en la señal de recepción es proporcional al retardo de tiempo entre el radar y el reflector. El cambio de frecuencia se hace mayor con un mayor retraso de tiempo. El cambio de frecuencia es directamente proporcional a la distancia recorrida. Esa distancia puede mostrarse en un instrumento, y también puede estar disponible a través del transpondedor. Este procesamiento de señal es similar al utilizado en el radar Doppler de detección de velocidad. Los sistemas de ejemplo que utilizan este enfoque son AZUSA, MISTRAM y UDOP.
Una ventaja adicional es que el radar puede funcionar eficazmente a frecuencias relativamente bajas. Esto fue importante en el desarrollo temprano de este tipo cuando la generación de señal de alta frecuencia era difícil o costosa.
El radar terrestre usa señales FM de baja potencia que cubren un rango de frecuencia mayor. Las reflexiones múltiples se analizan matemáticamente para cambios de patrones con pases múltiples creando una imagen sintética computarizada. Se utilizan efectos Doppler que permiten detectar objetos de movimiento lento y eliminar en gran medida el "ruido" de las superficies de los cuerpos de agua.
Medida de velocidad
La velocidad es el cambio en la distancia a un objeto con respecto al tiempo. Por lo tanto, el sistema existente para medir la distancia, combinado con una capacidad de memoria para ver dónde estaba el objetivo, es suficiente para medir la velocidad. Hubo un tiempo en que la memoria consistía en que un usuario hiciera marcas de lápiz graso en la pantalla del radar y luego calculara la velocidad usando una regla de cálculo. Los sistemas de radar modernos realizan la operación equivalente de forma más rápida y precisa utilizando computadoras.
Si la salida del transmisor es coherente (sincronización de fase), hay otro efecto que se puede usar para realizar mediciones de velocidad casi instantáneas (no se requiere memoria), conocido como efecto Doppler. La mayoría de los sistemas de radar modernos usan este principio en el radar Doppler y en los sistemas de radar Doppler por pulso (radar meteorológico, radar militar). El efecto Doppler solo puede determinar la velocidad relativa del objetivo a lo largo de la línea de visión desde el radar hasta el objetivo. Cualquier componente de la velocidad del objetivo perpendicular a la línea de visión no puede determinarse utilizando el efecto Doppler solo, pero puede determinarse siguiendo el acimut del objetivo a lo largo del tiempo.
Es posible hacer un radar Doppler sin ningún pulso, conocido como radar de onda continua (radar CW), enviando una señal muy pura de una frecuencia conocida. El radar CW es ideal para determinar el componente radial de la velocidad de un objetivo. El radar CW se usa normalmente para controlar el tránsito y medir la velocidad del vehículo de forma rápida y precisa donde el alcance no es importante.
Cuando se usa un radar pulsado, la variación entre la fase de retornos sucesivos da la distancia que el objetivo se ha movido entre los pulsos, y así se puede calcular su velocidad. Otros desarrollos matemáticos en el procesamiento de señales de radar incluyen el análisis de frecuencia y tiempo (Weyl Heisenberg o wavelet), así como la transformada chirplet que hace uso del cambio de frecuencia de los retornos de los objetivos en movimiento ("chirrido").
Procesamiento de señal de pulso-Doppler

El procesamiento de la señal de pulso-Doppler incluye filtrado de frecuencia en el proceso de detección. El espacio entre cada pulso de transmisión se divide en celdas de rango o puertas de rango. Cada celda se filtra de forma independiente, al igual que el proceso utilizado por un analizador de espectro para producir la pantalla que muestra diferentes frecuencias. Cada distancia diferente produce un espectro diferente. Estos espectros se utilizan para realizar el proceso de detección. Esto es necesario para lograr un rendimiento aceptable en entornos hostiles que involucran el clima, el terreno y las contramedidas electrónicas.
El objetivo principal es medir tanto la amplitud como la frecuencia de la señal reflejada total desde múltiples distancias. Esto se usa con el radar meteorológico para medir la velocidad del viento radial y la velocidad de precipitación en cada volumen de aire diferente. Esto está relacionado con los sistemas informáticos para producir un mapa meteorológico electrónico en tiempo real. La seguridad de las aeronaves depende del acceso continuo a la información precisa del radar meteorológico que se utiliza para prevenir lesiones y accidentes. El radar meteorológico usa un PRF bajo. Los requisitos de coherencia no son tan estrictos como los de los sistemas militares porque las señales individuales normalmente no necesitan separarse. Se requiere un filtrado menos sofisticado, y el procesamiento de ambigüedad de rango no es normalmente necesario con el radar meteorológico en comparación con el radar militar destinado a rastrear vehículos aéreos.
El objetivo alternativo es la capacidad de "mirar hacia abajo / derribar" requerida para mejorar la supervivencia del combate aéreo militar. Pulse-Doppler también se utiliza para el radar de vigilancia basado en tierra requerido para defender al personal y los vehículos. El procesamiento de la señal de pulso-Doppler aumenta la distancia de detección máxima utilizando menos radiación en las proximidades de los pilotos de aviones, personal de a bordo, infantería y artillería. Los reflejos del terreno, el agua y el clima producen señales mucho más grandes que los aviones y misiles, lo que permite a los vehículos que se mueven rápidamente esconderse utilizando técnicas de vuelo de siesta y tecnología furtiva para evitar su detección hasta que un vehículo de ataque esté demasiado cerca para destruirlo. El procesamiento de la señal de pulso-Doppler incorpora un filtrado electrónico más sofisticado que elimina con seguridad este tipo de debilidad. Esto requiere el uso de una frecuencia de repetición de pulso media con hardware coherente de fase que tiene un amplio rango dinámico. Las aplicaciones militares requieren un PRF medio que impide que el rango se determine directamente, y se requiere un procesamiento de resolución de ambigüedad de rango para identificar el verdadero rango de todas las señales reflejadas. El movimiento radial generalmente está vinculado con la frecuencia Doppler para producir una señal de bloqueo que no puede ser producida por las señales de bloqueo del radar. El procesamiento de la señal de pulso-Doppler también produce señales audibles que pueden usarse para la identificación de amenazas. El movimiento radial generalmente está vinculado con la frecuencia Doppler para producir una señal de bloqueo que no puede ser producida por las señales de bloqueo del radar. El procesamiento de la señal de pulso-Doppler también produce señales audibles que pueden usarse para la identificación de amenazas. El movimiento radial generalmente está vinculado con la frecuencia Doppler para producir una señal de bloqueo que no puede ser producida por las señales de bloqueo del radar. El procesamiento de la señal de pulso-Doppler también produce señales audibles que pueden usarse para la identificación de amenazas.
Reducción de los efectos de interferencia
El procesamiento de la señal se emplea en los sistemas de radar para reducir los efectos de interferencia del radar. Las técnicas de procesamiento de señal incluyen indicación de objetivo en movimiento, procesamiento de señal Pulse-Doppler, procesadores de detección de objetivo móviles, correlación con objetivos de radar de vigilancia secundarios, procesamiento adaptativo de espacio-tiempo y seguimiento-antes-detección. La tasa constante de falsas alarmas y el procesamiento digital del modelo de terreno también se utilizan en entornos desordenados.
Trace y pista de extracción
Un algoritmo de seguimiento es una estrategia de mejora del rendimiento del radar. Los algoritmos de seguimiento proporcionan la capacidad de predecir la posición futura de múltiples objetos en movimiento en función del historial de las posiciones individuales que informan los sistemas de sensores.
La información histórica se acumula y se utiliza para predecir la posición futura para su uso con el control del tráfico aéreo, la estimación de amenazas, la doctrina del sistema de combate, la puntería de las armas y la orientación de misiles. Los datos de posición son sensores de radar acumulados en el lapso de algunos minutos.
Hay cuatro algoritmos de seguimiento comunes.
- Algoritmo del vecino más cercano
- Asociación de datos probabilísticos
- Seguimiento de Hipótesis Múltiple
- Modelo múltiple interactivo (IMM)
Las devoluciones de video por radar desde una aeronave pueden someterse a un proceso de extracción de parcela por el cual se descartan las señales espurias e interferentes. Se puede controlar una secuencia de devoluciones de objetivos a través de un dispositivo conocido como extractor de gráficos.
Los retornos no relevantes en tiempo real pueden eliminarse de la información mostrada y mostrarse un solo diagrama. En algunos sistemas de radar, o alternativamente en el sistema de comando y control al que está conectado el radar, se usa un rastreador de radar para asociar la secuencia de tramas que pertenecen a objetivos individuales y estimar los títulos y las velocidades de los objetivos.
Ingenieria

Los componentes de un radar son:
- Un transmisor que genera la señal de radio con un oscilador como un klystron o un magnetrón y controla su duración mediante un modulador.
- Una guía de onda que une el transmisor y la antena.
- Un duplexor que sirve como un interruptor entre la antena y el transmisor o el receptor para la señal cuando la antena se usa en ambas situaciones.
- Un receptor Conociendo la forma de la señal recibida deseada (un pulso), se puede diseñar un receptor óptimo usando un filtro adaptado.
- Un procesador de pantalla para producir señales para dispositivos de salida legibles por humanos.
- Una sección electrónica que controla todos esos dispositivos y la antena para realizar el escaneo de radar ordenado por software.
- Un enlace a los dispositivos y pantallas del usuario final.
Diseño de antena

Las señales de radio transmitidas desde una sola antena se extenderán en todas las direcciones, y asimismo una sola antena recibirá señales de todas las direcciones en partes iguales. Esto deja al radar con el problema de decidir dónde se encuentra el objeto objetivo.
Los primeros sistemas tendían a utilizar antenas de difusión omnidireccionales, con antenas receptoras direccionales que apuntaban en varias direcciones. Por ejemplo, el primer sistema que se desplegó, Chain Home, utilizó dos antenas rectas en ángulo recto para la recepción, cada una en una pantalla diferente. El máximo retorno se detectaría con una antena en ángulo recto con el objetivo, y un mínimo con la antena apuntando directamente hacia él (extremo encendido). El operador podría determinar la dirección hacia un objetivo girando la antena de manera que una pantalla mostrara un máximo mientras que la otra mostrara un mínimo. Una seria limitación con este tipo de solución es que la transmisión se envía en todas las direcciones, por lo que la cantidad de energía en la dirección que se examina es una pequeña parte de la transmitida. Para obtener una cantidad razonable de poder en el "objetivo",
Reflector parabólico
Los sistemas más modernos usan un "plato" parabólico direccionable para crear un haz de transmisión ajustado, normalmente utilizando el mismo plato que el receptor. Dichos sistemas a menudo combinan dos frecuencias de radar en la misma antena para permitir una dirección automática o bloqueo de radar .
Los reflectores parabólicos pueden ser parábolas simétricas o parábolas estropeadas: las antenas parabólicas simétricas producen un rayo "lápiz" estrecho en las dimensiones X e Y y, en consecuencia, tienen una mayor ganancia. El radar meteorológico NEXRAD Pulse-Doppler utiliza una antena simétrica para realizar barridos volumétricos detallados de la atmósfera. Antenas parabólicas estropeadas producen un haz estrecho en una dimensión y una viga relativamente ancha en la otra. Esta característica es útil si la detección del objetivo en un amplio rango de ángulos es más importante que la ubicación del objetivo en tres dimensiones. La mayoría de los radares de vigilancia 2D utilizan una antena parabólica estropeada con un ancho de haz acimutal estrecho y ancho de haz vertical ancho. Esta configuración del haz permite al operador del radar detectar una aeronave con un azimut específico pero a una altura indeterminada. Por el contrario, el llamado "

Tipos de escaneo
- Escaneo primario: una técnica de escaneo donde la antena de la antena principal se mueve para producir un rayo de escaneo, los ejemplos incluyen escaneo circular, escaneo sectorial, etc.
- Escaneo secundario: una técnica de escaneo donde la alimentación de la antena se mueve para producir un rayo de escaneo, los ejemplos incluyen escaneo cónico, escaneo de sector unidireccional, cambio de lóbulo, etc.
- Palmer Scan: una técnica de escaneo que produce un rayo de exploración moviendo la antena principal y su alimentación. Una exploración Palmer es una combinación de una exploración primaria y una exploración secundaria.
- Exploración cónica: el haz del radar gira en un pequeño círculo alrededor del eje de "eje de referencia", que apunta al objetivo.
Guía de onda ranurada

Aplicada de manera similar al reflector parabólico, la guía de ondas ranuradas se mueve mecánicamente para escanear y es particularmente adecuada para sistemas de escaneo de superficie sin seguimiento, donde el patrón vertical puede permanecer constante. Debido a su menor costo y menor exposición al viento, los radares de vigilancia de a bordo, de superficie de aeropuertos y de puertos ahora utilizan este enfoque con preferencia a una antena parabólica.
Matriz de fases
Otro método de dirección se usa en un radar phased array.
Las antenas de matriz en fase están compuestas de elementos de antena similares espaciados uniformemente, como antenas o filas de guía de ondas ranuradas. Cada elemento de antena o grupo de elementos de antena incorpora un desplazamiento de fase discreto que produce un gradiente de fase a través de la matriz. Por ejemplo, los elementos de la matriz que producen un desplazamiento de fase de 5 grados para cada longitud de onda a través de la cara de la matriz producirán un haz apuntando 5 grados desde la línea central perpendicular a la cara de la matriz. Las señales que viajan a lo largo de esa viga serán reforzadas. Las señales compensadas de ese haz se cancelarán. La cantidad de refuerzo es ganancia de antena. La cantidad de cancelación es supresión del lóbulo lateral.
Los radares phased array han estado en uso desde los primeros años del radar en la Segunda Guerra Mundial (radar Mammut), pero las limitaciones de los dispositivos electrónicos provocaron un rendimiento deficiente. Los radares phased array se usaron originalmente para defensa de misiles (ver, por ejemplo, Safeguard Program). Son el corazón del Sistema de Combate Aegis naval y del Sistema de misiles Patriot. La redundancia masiva asociada con tener una gran cantidad de elementos de matriz aumenta la confiabilidad a expensas de la degradación gradual del rendimiento que ocurre cuando los elementos de fase individuales fallan. En menor medida, los radares phased array se han utilizado en Weather Monitoring. A partir de 2017, NOAA planea implementar una red nacional de radares multifuncionales phased array en todo Estados Unidos dentro de 10 años, para estudios meteorológicos y monitoreo de vuelo.
La antena de antenas en fase se puede construir para adaptarse a formas específicas, como misiles, vehículos de apoyo de infantería, barcos y aviones.
A medida que el precio de la electrónica ha bajado, los radares phased array se han vuelto más comunes. Casi todos los sistemas modernos de radar militar se basan en matrices en fases, donde el pequeño costo adicional se compensa con la confiabilidad mejorada de un sistema sin partes móviles. Los diseños tradicionales de antenas móviles aún se utilizan ampliamente en roles en los que el costo es un factor importante, como la vigilancia del tráfico aéreo y sistemas similares.
Los radares phased array se valoran para su uso en aeronaves ya que pueden rastrear múltiples objetivos. El primer avión que usó un radar phased array fue el B-1B Lancer. El primer avión de combate que utilizó un radar phased array fue el Mikoyan MiG-31. El SBI-16 Zasson Passive radar de barrido electrónico del MiG-31M fue considerado como el radar de combate más poderoso del mundo, hasta que el array activo AN / APG-77 Active fue presentado en el Lockheed Martin F-22 Raptor.
Las técnicas de interferometría de matriz phased-array o de apertura, que utilizan una serie de platos separados que se introducen en fases en una sola apertura efectiva, no son típicas para las aplicaciones de radar, aunque son ampliamente utilizadas en la radioastronomía. Debido a la maldición de matriz adelgazada, tales arreglos de apertura múltiple, cuando se usan en transmisores, dan como resultado haces estrechos a costa de reducir la potencia total transmitida al objetivo. En principio, tales técnicas podrían aumentar la resolución espacial, pero la menor potencia significa que esto generalmente no es efectivo.
La síntesis de apertura mediante el procesamiento de datos de movimiento desde una única fuente móvil, por otro lado, es ampliamente utilizada en sistemas de radar espaciales y aéreos.
Bandas de frecuencia
Los nombres de las bandas tradicionales se originaron como nombres codificados durante la Segunda Guerra Mundial y todavía se usan en el ámbito militar y de la aviación en todo el mundo. Han sido adoptados en los Estados Unidos por el Instituto de Ingenieros Eléctricos y Electrónicos e internacionalmente por la Unión Internacional de Telecomunicaciones. La mayoría de los países tienen regulaciones adicionales para controlar qué partes de cada banda están disponibles para uso civil o militar.
Otros usuarios del espectro de radio, como las industrias de radiodifusión y contramedidas electrónicas, han reemplazado las designaciones militares tradicionales con sus propios sistemas.
| HF | 3-30 MHz | 10-100 m | Radares costeros, radares de radar sobre el horizonte (OTH); 'alta frecuencia' |
| VHF | 30-300 MHz | 1-10 m | Muy largo alcance, penetrando en el suelo; 'muy alta frecuencia' |
| PAG | <300 MHz | > 1 m | 'P' para 'anterior', aplicado retrospectivamente a los primeros sistemas de radar; esencialmente HF + VHF |
| UHF | 300-1000 MHz | 0.3-1 m | Alcance muy largo (p. Ej. Advertencia temprana de misiles balísticos), penetración en el suelo, penetración de follaje; 'Frecuencia ultra alta' |
| L | 1-2 GHz | 15-30 cm | Control y vigilancia del tránsito aéreo de largo alcance; 'L' para 'largo' |
| S | 2-4 GHz | 7.5-15 cm | Vigilancia de rango moderado, control de tráfico aéreo terminal, clima de largo alcance, radar marino; 'S' para 'corto' |
| do | 4-8 GHz | 3.75-7.5 cm | Transpondedores de satélite; un compromiso (de ahí 'C') entre las bandas X y S; clima; seguimiento de largo alcance |
| X | 8-12 GHz | 2.5-3.75 cm | Dirección de misiles, radar marino, clima, mapeo de resolución media y vigilancia en tierra; en los Estados Unidos, el estrecho rango de 10.525 GHz ± 25 MHz se utiliza para los radares aeroportuarios;seguimiento de corto alcance. Nombrada banda X porque la frecuencia era un secreto durante WW2. |
| K u | 12-18 GHz | 1.67-2.5 cm | Alta resolución, también utilizado para transpondedores de satélite, frecuencia bajo la banda K (de ahí 'u') |
| K | 18-24 GHz | 1.11-1.67 cm | Del alemán kurz , que significa 'corto'; uso limitado debido a la absorción por vapor de agua, por lo que K u y K a se utilizaron en su lugar para la vigilancia. La banda K se usa para detectar nubes por los meteorólogos y por la policía para detectar a los automovilistas que apresuran. Las pistolas de radar de banda K funcionan a 24.150 ± 0.100 GHz. |
| K a | 24-40 GHz | 0,75-1,11 cm | Mapeo, corto alcance, vigilancia aeroportuaria; frecuencia justo por encima de la banda K (por lo tanto, 'a') El radar de fotografías, que se utiliza para disparar cámaras que toman fotografías de matrículas de automóviles que funcionan con luces rojas, funciona a 34,300 ± 0,100 GHz. |
| mm | 40-300 GHz | 1.0-7.5 mm | Banda milimétrica, subdividida como abajo. Los rangos de frecuencia dependen del tamaño de la guía de onda. Múltiples letras son asignadas a estas bandas por diferentes grupos. Estos son de Baytron, una empresa ahora difunta que hizo equipos de prueba. |
| V | 40-75 GHz | 4.0-7.5 mm | Muy fuertemente absorbido por el oxígeno atmosférico, que resuena a 60 GHz. |
| W | 75-110 GHz | 2.7-4.0 mm | Se utiliza como sensor visual para vehículos autónomos experimentales, observación meteorológica de alta resolución e imágenes. |
Moduladores de radar
Los moduladores actúan para proporcionar la forma de onda del pulso de RF. Hay dos diseños de modulador de radar diferentes:
- Interruptor de alto voltaje para osciladores de potencia con clave no coherente Estos moduladores consisten en un generador de impulsos de alta tensión formado por una fuente de alta tensión, una red de formación de impulsos y un conmutador de alta tensión como un tiratrón. Generan pulsos cortos de energía para alimentar, por ejemplo, el magnetrón, un tipo especial de tubo de vacío que convierte CC (generalmente pulsada) en microondas. Esta tecnología se conoce como energía pulsada. De esta forma, el pulso transmitido de la radiación de RF se mantiene a una duración definida y generalmente muy corta.
- Mezcladores híbridos, alimentados por un generador de forma de onda y un excitador para una forma de onda compleja pero coherente. Esta forma de onda puede generarse mediante señales de entrada de baja potencia / bajo voltaje. En este caso, el transmisor de radar debe ser un amplificador de potencia, por ejemplo, un klystron o un transmisor de estado sólido. De esta forma, el pulso transmitido se modula en intrapulso y el receptor de radar debe usar técnicas de compresión de pulso.
Refrigerante de radar
Los amplificadores de microondas coherentes que funcionan por encima de la salida de microondas de 1,000 vatios, como los tubos de ondas progresivas y los klistrones, requieren refrigerante líquido. El haz de electrones debe contener de 5 a 10 veces más potencia que la salida de microondas, que puede producir suficiente calor para generar plasma. Este plasma fluye desde el colector hacia el cátodo. El mismo enfoque magnético que guía el haz de electrones obliga al plasma a pasar al haz de electrones, pero fluyendo en la dirección opuesta. Esto introduce la modulación FM que degrada el rendimiento Doppler. Para evitar esto, se requiere líquido refrigerante con presión y caudal mínimos, y el agua desionizada se usa normalmente en la mayoría de los sistemas de radar de superficie de alta potencia que utilizan el procesamiento Doppler.
El Coolanol (éster de silicato) se usó en varios radares militares en la década de 1970. Sin embargo, es higroscópico, lo que lleva a la hidrólisis y la formación de alcohol altamente inflamable. La pérdida de un avión de la Armada de los Estados Unidos en 1978 se atribuyó a un incendio de éster de silicato. El Coolanol también es costoso y tóxico. La Marina de los Estados Unidos ha instituido un programa llamado Prevención de la contaminación (P2) para eliminar o reducir el volumen y la toxicidad de los desechos, las emisiones al aire y las descargas de efluentes. Debido a esto, Coolanol se usa con menos frecuencia hoy en día.
Regulaciones
El radar (también: RADAR ) se define en el artículo 1.100 del Reglamento de Radiocomunicaciones de la UIT (UIT) de la Unión Internacional de Telecomunicaciones (UIT) como:
Obtenido de: https://en.wikipedia.org/wiki/Radar