Submarino
Definición

Un submarino (o simplemente sub ) es una embarcación capaz de operar independientemente bajo el agua. Difiere de un sumergible, que tiene una capacidad submarina más limitada. El término más comúnmente se refiere a un gran barco con tripulación. También se usa a veces histórica o coloquialmente para referirse a vehículos y robots operados a distancia, así como a barcos de tamaño mediano o más pequeños, como el submarino enano y el submarino húmedo. El sustantivo submarino evolucionó como una forma abreviada de barco submarino ; según la tradición naval, los submarinos suelen denominarse "barcos" en lugar de "buques", independientemente de su tamaño (el barco suele reservarse para embarcaciones de tamaño relativamente pequeño).
Aunque los submarinos experimentales se habían construido antes, el diseño submarino despegó durante el siglo XIX, y fueron adoptados por varias marinas. Los submarinos fueron ampliamente utilizados durante la Primera Guerra Mundial (1914-1918), y ahora figuran en muchas armadas, grandes y pequeñas. Los usos militares incluyen atacar naves de superficie enemigas (mercantes y militares), atacar a otros submarinos, protección de portaaviones, bloqueo de funcionamiento, submarinos de misiles balísticos como parte de una fuerza de ataque nuclear, reconocimiento, ataque terrestre convencional (por ejemplo, utilizando un misil de crucero) y inserción encubierta de fuerzas especiales. Los usos civiles para submarinos incluyen ciencia marina, salvamento, exploración e inspección y mantenimiento de instalaciones. Los submarinos también se pueden modificar para realizar funciones más especializadas, como misiones de búsqueda y rescate o reparación de cables submarinos.
La mayoría de los grandes submarinos consisten en un cuerpo cilíndrico con extremos semiesféricos (o cónicos) y una estructura vertical, generalmente ubicada en el medio del barco, que alberga dispositivos de comunicación y sensores, así como periscopios. En los submarinos modernos, esta estructura es la "vela" en el uso estadounidense y la "aleta" en el uso europeo. Una "torre de maniobras" era una característica de los diseños anteriores: un casco de presión separado sobre el cuerpo principal del barco que permitía el uso de periscopios más cortos. Hay una hélice (o chorro de bomba) en la parte trasera y varias aletas de control hidrodinámicas. Los submarinos más pequeños, de inmersión profunda y especializados pueden desviarse significativamente de este diseño tradicional. Los submarinos utilizan aviones de buceo y también cambian la cantidad de agua y aire en los tanques de lastre para cambiar la flotabilidad para sumergirse y emerger.
Los submarinos tienen una de las más amplias gamas de tipos y capacidades de cualquier embarcación. Abarcan desde pequeños ejemplos autónomos y embarcaciones de una o dos personas que operan durante unas horas hasta embarcaciones que pueden permanecer sumergidas durante seis meses, como la clase rusa Typhoon, los submarinos más grandes jamás construidos. Los submarinos pueden trabajar a profundidades mayores que las que son susceptibles de supervivencia o prácticas para buceadores humanos. Los modernos submarinos de buceo profundo se derivan del batiscafo, que a su vez evolucionó a partir de la campana de buceo.
Historia
Primeros sumergibles
Según un informe en Opusculum Taisnieri publicado en 1562:
En 1578, el matemático inglés William Bourne registró en su libro Inventions o Devises uno de los primeros planes para un vehículo de navegación subacuático. Unos años más tarde, el matemático y teólogo escocés John Napier escribió en sus Invenciones Secretas (1596) lo siguiente: "Estos inventos además de los diseños de balbucear bajo el agua con buceadores, otros ingenios y estratagemas para dañar a los enemigos por la Gracia de Dios y el trabajo de artesanos expertos que espero realizar ". No está claro si alguna vez llevó a cabo su idea.
El primer sumergible de cuya construcción existe información confiable fue diseñado y construido en 1620 por Cornelis Drebbel, un holandés al servicio de James I de Inglaterra. Fue propulsado por medio de remos.
siglo 18
A mediados del siglo XVIII, se habían otorgado en Inglaterra más de una docena de patentes de submarinos / embarcaciones sumergibles. En 1747, Nathaniel Symons patentó y construyó el primer ejemplo de trabajo conocido del uso de un tanque de lastre para la inmersión. Su diseño utilizó bolsas de cuero que podrían llenarse de agua para sumergir la nave. Se usó un mecanismo para torcer el agua de las bolsas y hacer que el bote resurja. En 1749, la revista Gentlemen's Magazine informó que un diseño similar había sido propuesto inicialmente por Giovanni Borelli en 1680. En este punto de desarrollo, la mejora adicional del diseño necesariamente se estancó durante más de un siglo, hasta que se pudieron aplicar nuevas tecnologías industriales de propulsión y estabilidad.
El primer submarino militar fue la tortuga (1775), un dispositivo accionado a mano en forma de bellota diseñado por el estadounidense David Bushnell para acomodar a una sola persona. Fue el primer submarino verificado capaz de operación y movimiento submarinos independientes, y el primero en usar tornillos para propulsión.
Siglo 19
En 1800, Francia construyó un submarino de propulsión humana diseñado por el estadounidense Robert Fulton, el Nautilus . Los franceses finalmente se dieron por vencidos en el experimento en 1804, al igual que los británicos cuando más tarde consideraron el diseño submarino de Fulton.
En 1864, al final de la guerra civil americana, de la Armada de la Confederación HL Hunley se convirtió en el primer submarino militar para hundir un buque enemigo, la Unión corbeta de guerra USS Housatonic . A raíz de su exitoso ataque contra la nave, Hunley también se hundió, posiblemente porque estaba demasiado cerca de su propio torpedo explosivo.
En 1866, el Sub Marine Explorer fue el primer submarino en bucear con éxito, navegar bajo el agua y resurgir bajo el control de la tripulación. El diseño del alemán estadounidense Julius H. Kroehl (en alemán, Kröhl ) incorporó elementos que todavía se usan en los submarinos modernos.
Potencia mecánica

El primer submarino que no confió en la potencia humana para la propulsión fue el francés Plongeur ( Diver ), lanzado en 1863, que utilizó aire comprimido a 180 psi (1241 kPa). El primer submarino independiente del aire y de combustión fue Ictineo II, diseñado por el intelectual, artista e ingeniero español Narcís Monturiol, lanzado en Barcelona en 1864.
El submarino se convirtió en un arma potencialmente viable con el desarrollo del torpedo Whitehead, diseñado en 1866 por el ingeniero británico Robert Whitehead, el primer torpedo autopropulsado o locomotor. El torpedo de mástil que había sido desarrollado anteriormente por la armada confederada se consideró impracticable, ya que se creía que había hundido tanto su objetivo previsto, y probablemente HL Hunley , el submarino que lo desplegó.
Las discusiones entre el clérigo e inventor inglés George Garrett y el industrial sueco Thorsten Nordenfelt dieron lugar a los primeros submarinos prácticos a vapor, armados con torpedos y listos para el uso militar. La primera fue Nordenfelt I , una embarcación de 56 toneladas y 19,5 metros similar a la nefasta Resurgam (1879) de Garrett , con un alcance de 240 kilómetros (130 millas náuticas; 150 millas), armada con un solo torpedo. en 1885
Un medio confiable de propulsión para el buque sumergido solo fue posible en la década de 1880 con la llegada de la tecnología de batería eléctrica necesaria. Los primeros barcos con motor eléctrico fueron construidos por Isaac Peral y Caballero en España, Dupuy de Lôme y Gustave Zédé en Francia, y James Franklin Waddington en Inglaterra. El diseño de Peral incluía torpedos y otros sistemas que luego se convirtieron en estándar en submarinos.
siglo 20


Los submarinos no se pusieron en servicio para ningún uso generalizado o rutinario por las armadas hasta principios del siglo XX. Esta era marcó un momento crucial en el desarrollo submarino, y varias tecnologías importantes aparecieron. Varias naciones construyeron y usaron submarinos. La propulsión eléctrica diesel se convirtió en el sistema de potencia dominante y los equipos como el periscopio se estandarizaron. Los países llevaron a cabo muchos experimentos sobre tácticas efectivas y armas para submarinos, lo que provocó su gran impacto en la Primera Guerra Mundial.
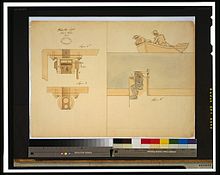
El inventor irlandés John Philip Holland construyó un modelo de submarino en 1876 y una versión a escala real en 1878, que fue seguido por una serie de fracasos. En 1896 diseñó el submarino Holland Type VI, que utilizaba la potencia del motor de combustión interna en la superficie y la energía de la batería eléctrica bajo el agua. Lanzado el 17 de mayo de 1897 en el astillero Crescent Shipyard de la Armada Lewis Nixon en Elizabeth, Nueva Jersey, Holland VI fue adquirido por la Armada de los Estados Unidos el 11 de abril de 1900, convirtiéndose en el primer submarino comisionado de la Armada, bautizado como USS Holland .
Encargado en junio de 1900, el vapor francés y la eléctrica Narval emplearon el ahora típico diseño de doble casco, con un casco a presión dentro de la cubierta exterior. Estas naves de 200 toneladas tenían un alcance de más de 100 millas (161 km) bajo el agua. El submarino francés Aigrette en 1904 mejoró aún más el concepto mediante el uso de un motor diesel en lugar de gasolina para la potencia de superficie. Se construyeron grandes cantidades de estos submarinos, con setenta y seis completados antes de 1914.
La Royal Navy encargó a cinco submarinos de clase Holland de Vickers, Barrow-in-Furness, bajo licencia de Holland Torpedo Boat Company de 1901 a 1903. La construcción de los barcos tomó más tiempo de lo esperado, y el primero solo estaba listo para una prueba de buceo en mar el 6 de abril de 1902. Aunque el diseño había sido comprado completamente de la compañía estadounidense, el diseño real utilizado fue una mejora no probada del diseño original de Holland utilizando un nuevo motor de gasolina de 180 caballos de fuerza (130 kW).
Estos tipos de submarinos se usaron por primera vez durante la Guerra Ruso-Japonesa de 1904-05. Debido al bloqueo en Port Arthur, los rusos enviaron sus submarinos a Vladivostok, donde el 1 de enero de 1905 había siete barcos, suficientes para crear la primera "flota submarina operativa" del mundo. La nueva flota de submarinos comenzó a patrullar el 14 de febrero, con una duración de alrededor de 24 horas cada uno. El primer enfrentamiento con buques de guerra japoneses ocurrió el 29 de abril de 1905 cuando el submarino ruso Som fue disparado por torpederos japoneses, pero luego se retiró.
Primera Guerra Mundial

Los submarinos militares primero tuvieron un impacto significativo en la Primera Guerra Mundial. Fuerzas como los U-boats de Alemania vieron acción en la Primera Batalla del Atlántico, y fueron responsables de hundir RMS Lusitania , que fue hundido como resultado de una guerra submarina sin restricciones y a menudo se cita entre las razones para la entrada de los Estados Unidos en la guerra.
Al estallar la guerra, Alemania tenía solamente veinte submarinos disponibles de inmediato para el combate, aunque estos incluían barcos de la clase U-19 con motor diesel con el rango (5,000 millas) y velocidad (8 nudos (15 km / h; 9.2 mph)) para operar de manera efectiva en toda la costa británica. Por el contrario, la Royal Navy tenía un total de 74 submarinos, aunque de eficacia mixta. En agosto de 1914, una flotilla de diez U-boats zarpó de su base en Heligoland para atacar buques de guerra de la Armada Real en el Mar del Norte en la primera patrulla de guerra submarina en la historia.
La capacidad de los U-boats para funcionar como máquinas de guerra prácticas se basó en nuevas tácticas, sus números y tecnologías submarinas, como el sistema combinado de energía diesel-eléctrica desarrollado en los años anteriores. Más sumergibles que verdaderos submarinos, los submarinos operaban principalmente en la superficie con motores regulares, sumergiéndose ocasionalmente para atacar con energía de la batería. Eran más o menos triangulares en sección transversal, con una quilla distinta para controlar el balanceo mientras emergían, y un arco distinto. Durante la Primera Guerra Mundial más de 5,000 barcos aliados fueron hundidos por submarinos.
Este británico trató de alcanzar a los alemanes en términos de tecnología submarina con la creación de los submarinos clase K. Sin embargo, estos eran extremadamente grandes y a menudo colisionaron entre sí, lo que obligó a los británicos a desechar el diseño de la clase K poco después de la guerra.
Segunda Guerra Mundial


Durante la Segunda Guerra Mundial, Alemania usó submarinos con un efecto devastador en la Batalla del Atlántico, donde intentó cortar las rutas de suministro de Gran Bretaña hundiendo más buques mercantes de los que Gran Bretaña podría reemplazar. (El envío fue vital para abastecer a la población de Gran Bretaña con alimentos, la industria con materia prima y las fuerzas armadas con combustible y armamento.) Mientras que los submarinos destruyeron un número significativo de barcos, la estrategia finalmente falló. Aunque los submarinos se actualizaron en los años de entreguerras, la innovación más importante fue la mejora de las comunicaciones, cifradas mediante la famosa máquina de cifrado Enigma. Esto permitió tácticas navales de ataque masivo ( Rudeltaktik, comúnmente conocido como "wolfpack"), pero también fue la caída de los U-boats. Al final de la guerra, casi 3.000 barcos aliados (175 buques de guerra, 2.825 buques mercantes) habían sido hundidos por submarinos. Aunque tuvo éxito al principio de la guerra, finalmente la flota de submarinos sufrió un índice de bajas del 73%, casi todas las muertes.
La Armada Imperial Japonesa operaba la más variada flota de submarinos de cualquier armada, incluidos los torpedos tripulados Kaiten , los submarinos enano ( clases Ko-hyoteki y Kairyu detipo A ), submarinos de rango medio, submarinos de suministro especialmente diseñados y submarinos de flota de largo alcance. También tenían submarinos con las velocidades sumergidas más altas durante la Segunda Guerra Mundial ( submarinos clase I-201 ) y submarinos que podían transportar múltiples aeronaves ( I-400submarinos de clase). También estaban equipados con uno de los torpedos más avanzados del conflicto, el tipo 95 propulsado por oxígeno. Sin embargo, a pesar de su destreza técnica, Japón optó por utilizar sus submarinos para la guerra de flota, y consecuentemente fueron relativamente infructuosos, ya que los buques de guerra eran rápidos. maniobrable y bien defendido en comparación con los buques mercantes.
La fuerza submarina era el arma antibuque más efectiva en el arsenal estadounidense. Los submarinos, aunque solo el 2 por ciento de la Armada de los EE. UU., Destruyeron más del 30 por ciento de la Armada japonesa, incluidos 8 portaaviones, 1 acorazado y 11 cruceros. Los submarinos estadounidenses también destruyeron más del 60 por ciento de la flota mercante japonesa, paralizando la capacidad de Japón de suministrar sus fuerzas militares y el esfuerzo de guerra industrial. Los submarinos aliados en la Guerra del Pacífico destruyeron más barcos japoneses que todas las demás armas combinadas. Esta hazaña fue considerablemente ayudada por la falla de la Armada Imperial Japonesa de proporcionar fuerzas de escolta adecuadas para la flota mercante de la nación.
Durante la Segunda Guerra Mundial, 314 submarinos sirvieron en la Marina de los EE. UU., De los cuales casi 260 se desplegaron en el Pacífico. Cuando los japoneses atacaron Hawaii en diciembre de 1941, 111 embarcaciones estaban en comisión; Durante la guerra se encargaron 203 submarinos de las clases Gato , Balao y Tench . Durante la guerra, 52 submarinos estadounidenses se perdieron por todas las causas, con 48 directamente debido a las hostilidades. Los submarinos estadounidenses hundieron 1.560 buques enemigos, un tonelaje total de 5,3 millones de toneladas (55% del total hundido).
El Servicio de submarinos de la Royal Navy se utilizó principalmente en el clásico bloqueo del Eje. Sus principales áreas operativas fueron alrededor de Noruega, en el Mediterráneo (contra las rutas de suministro del Eje al norte de África) y en el Lejano Oriente. En esa guerra, los submarinos británicos hundieron 2 millones de toneladas de envío enemigo y 57 buques de guerra principales, el último incluyendo 35 submarinos. Entre estos se encuentra la única instancia documentada de un submarino hundiendo otro submarino mientras ambos estaban sumergidos. Esto ocurrió cuando HMS Venturer contrató U-864 ; el Venturer la tripulación calculó manualmente una solución de disparo exitosa contra un objetivo de maniobra tridimensional utilizando técnicas que se convirtieron en la base de los modernos sistemas de orientación por computadora de torpedos. Setenta y cuatro submarinos británicos se perdieron, la mayoría, cuarenta y dos, en el Mediterráneo.
Modelos militares de la Guerra Fría


El primer lanzamiento de un misil de crucero (Regulus SSM-N-8) desde un submarino ocurrió en julio de 1953, desde la cubierta del USS Tunny , un barco de la flota de la Segunda Guerra Mundial modificado para llevar el misil con una ojiva nuclear. Tunny y su barco hermano, Barbero , fueron los primeros submarinos de patrulla de disuasión nuclear de los Estados Unidos. En la década de 1950, la energía nuclear reemplazó parcialmente la propulsión diesel-eléctrica. El equipo también se desarrolló para extraer oxígeno del agua de mar. Estas dos innovaciones dieron a los submarinos la capacidad de permanecer sumergidos durante semanas o meses. La mayoría de los submarinos navales construidos desde entonces en los EE. UU., La Unión Soviética / Federación Rusa, Gran Bretaña y Francia han sido alimentados por reactores nucleares.
En 1959-1960, los primeros submarinos de misiles balísticos fueron puestos en servicio por los Estados Unidos ( clase George Washington ) y la Unión Soviética (clase Golf) como parte de la estrategia de disuasión nuclear de la Guerra Fría.
Durante la Guerra Fría, EE. UU. Y la Unión Soviética mantuvieron grandes flotas submarinas que se dedicaban a los juegos de gato y ratón. La Unión Soviética perdió al menos cuatro submarinos durante este período: K-129 se perdió en 1968 (una parte de la cual la CIA recuperó del fondo del océano con el barco diseñado por Howard Hughes Glomar Explorer ), K-8 en 1970, K- 219 en 1986, y Komsomolets en 1989 (que tuvo un récord profundo entre submarinos militares-1,000 m (3,300 pies)). Muchos otros submarinos soviéticos, como el K-19 (el primer submarino nuclear soviético y el primer submarino soviético en llegar al Polo Norte) fueron gravemente dañados por las fugas de fuego o radiación. Los EE. UU. Perdieron dos submarinos nucleares durante este tiempo: USS Thresher debido a falla del equipo durante una inmersión de prueba mientras está en su límite operacional, y USS Scorpion debido a causas desconocidas.
Durante la intervención de la India en la Guerra de Liberación de Bangladesh, el Hangor de la Armada de Pakistán hundió la fragata india INS Khukri . Este fue el primer hundimiento de un submarino desde la Segunda Guerra Mundial. Durante la misma guerra, el Ghazi , un submarino de clase Tench prestado a Pakistán desde los EE. UU., Fue hundido por la marina india. Fue la primera pérdida de combate submarino desde la Segunda Guerra Mundial. En 1982 durante la Guerra de las Malvinas, el crucero argentino General Belgrano fue hundido por el submarino británico HMS Conqueror , el primer hundimiento por un submarino de propulsión nuclear en la guerra.
Siglo 21
Uso
Militar


Antes y durante la Segunda Guerra Mundial, el papel principal del submarino era la guerra de buques anti-superficie. Los submarinos atacarían ya sea en la superficie, usando pistolas de cubierta o sumergidas, usando torpedos. Fueron particularmente efectivos en el hundimiento de la navegación transatlántica aliada en ambas guerras mundiales y en la interrupción de las rutas de suministro y las operaciones navales japonesas en el Pacífico durante la Segunda Guerra Mundial.
Los submarinos de extracción de minas se desarrollaron a principios del siglo XX. La instalación fue utilizada en ambas Guerras Mundiales. Los submarinos también se utilizaron para insertar y eliminar agentes encubiertos y fuerzas militares, reunir información y rescatar a la tripulación durante los ataques aéreos a las islas, donde los aviadores recibirían información sobre lugares seguros para aterrizar de manera que los submarinos pudieran rescatarlos. Los submarinos podrían transportar carga a través de aguas hostiles o actuar como buques de suministro para otros submarinos.
Los submarinos normalmente podían localizar y atacar a otros submarinos solo en la superficie, aunque el HMS Venturer logró hundir el U-864 con una dispersión de cuatro torpedos mientras ambos estaban sumergidos. Los británicos desarrollaron un submarino antisubmarino especializado en la Primera Guerra Mundial, la clase R. Después de la Segunda Guerra Mundial, con el desarrollo del torpedo de retorno, mejores sistemas de sonar y propulsión nuclear, los submarinos también pudieron cazar de manera efectiva.
El desarrollo de misiles balísticos lanzados desde submarinos y misiles de crucero lanzados desde submarinos les dio a los submarinos una capacidad sustancial y de largo alcance para atacar objetivos terrestres y marítimos con una variedad de armas que van desde bombas de racimo hasta armas nucleares.
La defensa principal de un submarino radica en su capacidad para permanecer oculto en las profundidades del océano. Los primeros submarinos podrían ser detectados por el sonido que hicieron. El agua es un excelente conductor de sonido (mucho mejor que el aire) y los submarinos pueden detectar y rastrear barcos de superficie relativamente ruidosos desde largas distancias. Los submarinos modernos se construyen con énfasis en el sigilo. Los diseños avanzados de la hélice, el amplio aislamiento reductor de sonido y la maquinaria especial ayudan a que un submarino permanezca tan silencioso como el ruido ambiental del océano, lo que dificulta su detección. Se necesita tecnología especializada para encontrar y atacar submarinos modernos.
El sonar activo usa el reflejo del sonido emitido por el equipo de búsqueda para detectar submarinos. Ha sido utilizado desde la Segunda Guerra Mundial por barcos de superficie, submarinos y aviones (a través de boyas caídas y arrays de "inmersión" de helicópteros), pero revela la posición del emisor y es susceptible de contramedidas.
Un submarino militar oculto es una amenaza real y, debido a su sigilo, puede obligar a una armada enemiga a desperdiciar recursos en grandes áreas del océano y proteger a los barcos contra los ataques. Esta ventaja se demostró vívidamente en la Guerra de las Malvinas de 1982 cuando el submarino HMS Conqueror, de propulsión nuclear británica, hundió el crucero argentino General Belgrano . Después del hundimiento, la Armada Argentina reconoció que no tenían una defensa efectiva contra el ataque submarino, y la flota de superficie argentina se retiró a puerto por el resto de la guerra, aunque un submarino argentino permaneció en el mar.
Civil
Aunque la mayoría de los submarinos del mundo son militares, existen algunos submarinos civiles, que se utilizan para inspecciones de turismo, exploración, plataformas de petróleo y gas y estudios de tuberías. Algunos también se utilizan en actividades ilegales.
El viaje de Submarine Voyage se abrió en Disneyland en 1959, pero aunque corría bajo el agua, no era un verdadero submarino, ya que corría por las vías y estaba abierto a la atmósfera. El primer submarino turístico fue Auguste Piccard , que entró en servicio en 1964 en Expo64. En 1997, había 45 submarinos turísticos operando en todo el mundo. Los submarinos con una profundidad de aplastamiento en el rango de 400-500 pies (120-150 m) operan en varias áreas en todo el mundo, generalmente con profundidades inferiores de entre 30 y 37 m, con una capacidad de carga de 50 a 100 pasajeros
En una operación típica, un buque de superficie transporta pasajeros a un área operativa costa afuera y los carga en el submarino. El submarino luego visita puntos de interés bajo el agua tales como estructuras de arrecifes naturales o artificiales. Para salir a la superficie con seguridad y sin peligro de colisión, la ubicación del submarino se marca con una liberación de aire y el movimiento hacia la superficie es coordinado por un observador en una nave de soporte.
Un desarrollo reciente es el despliegue de los llamados narco submarinos por narcotraficantes sudamericanos para evadir la detección de las fuerzas del orden público. Aunque ocasionalmente despliegan verdaderos submarinos, la mayoría son semi-sumergibles autopropulsables, donde una porción de la nave permanece sobre el agua en todo momento. En septiembre de 2011, las autoridades colombianas decomisaron un sumergible de 16 metros de largo que podía contener a una tripulación de 5 personas, con un costo aproximado de $ 2 millones. El buque pertenecía a los rebeldes de las FARC y tenía la capacidad de transportar al menos 7 toneladas de drogas.
- Submarinos civiles
 Modelo del Mésoscaphe Auguste Piccard
Modelo del Mésoscaphe Auguste Piccard Interior del submarino turístico Atlantis mientras está sumergido
Interior del submarino turístico Atlantis mientras está sumergido Submarino turístico Atlantis
Submarino turístico Atlantis
Operaciones polares

- 1903 - El Protector submarino Simon Lake emergió a través del hielo frente a Newport, Rhode Island.
- 1930 - El USS O-12 operó bajo hielo cerca de Spitsbergen.
- 1937 - El submarino soviético Krasnogvardeyets operó bajo el hielo en el estrecho de Dinamarca.
- 1941-45 - Los submarinos alemanes operaron bajo el hielo desde el mar de Barents hasta el mar Laptev.
- 1946 - El USS Atule usó un fathometer de haz ascendente en la Operación Nanook en el Estrecho de Davis.
- 1946-47 - El Sennet de USS usó un sónar bajo hielo en la Operación salto de altura en la Antártida.
- 1947 - USS Boarfish utilizó ecosonda de haz ascendente bajo el hielo en el mar de Chukchi.
- 1948 - USS Carp desarrolló técnicas para realizar ascensos y descensos verticales a través de polinias en el mar de Chukchi.
- 1952 - USS Redfish usó un conjunto de sonda expansiva hacia arriba en el Mar de Beaufort.
- 1957 - USS Nautilus alcanzó 87 grados al norte cerca de Spitsbergen.
- 3 de agosto de 1958 - Nautilus utilizó un sistema de navegación inercial para llegar al Polo Norte.
- 17 de marzo de 1959: USS Skate apareció en el hielo del polo norte.
- 1960 - USS Sargo transitó 900 millas (1.400 km) bajo el hielo sobre la plataforma poco profunda (125 a 180 pies o 38 a 55 metros de profundidad) Bering-Chukchi.
- 1960 - USS Seadragon transita bajo el hielo el Pasaje del Noroeste.
- 1962: el submarino soviético de clase noviembre K-3 Leninsky Komsomol alcanza el polo norte.
- 1970 - USS Queenfish llevó a cabo una extensa prospección de mapeo submarino de la plataforma continental de Siberia.
- 1971 - HMS Dreadnought alcanzó el Polo Norte.
- USS Gurnard realizó tres ejercicios polares: 1976 (con el actor estadounidense Charlton Heston a bordo); 1984 operaciones conjuntas con USS Pintado ; y ejercicios conjuntos de 1990 con USS Seahorse .
- 6 de mayo de 1986: USS Ray , USS Archerfish y USS Hawkbill se encuentran y emergenjuntos en el Polo Norte Geográfico. Primera superficie de tres submarinos en el Polo.
- 19 de mayo de 1987: HMS Superb se unió a USS Billfish y USS Sea Devil en el Polo Norte.
- Marzo de 2007: el USS Alexandria participó en el Ejercicio conjunto de hielo de la Armada de EE. UU. / Royal Navy 2007 (ICEX-2007) en el Océano Ártico con el submarino de clase Trafalgar HMS Tireless .
- Marzo de 2009: el USS Annapolis participó en Ice Exercise 2009 para probar la capacidad de operación submarina y la capacidad de combate de guerra en condiciones árticas.
Tecnología
Sumersión y recorte
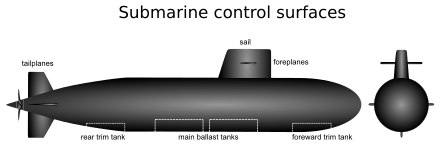

Todos los buques de superficie, así como los submarinos con superficie, se encuentran en una condición positiva de flotación, que pesa menos que el volumen de agua que desplazarían si se sumergieran por completo. Para sumergirse hidrostáticamente, un barco debe tener flotabilidad negativa, ya sea aumentando su propio peso o disminuyendo su desplazamiento de agua. Para controlar su desplazamiento, los submarinos tienen tanques de lastre, que pueden contener cantidades variables de agua y aire.
Para la inmersión general o la superficie, los submarinos usan los tanques de proa y popa, llamados Tanques de lastre principal (MBT), que se llenan con agua para sumergirse o con aire a superficie. Sumergidos, los MBT generalmente permanecen inundados, lo que simplifica su diseño, y en muchos submarinos estos tanques son una sección del espacio entre cascos. Para un control más preciso y rápido de la profundidad, los submarinos usan tanques de control de profundidad (DCT) más pequeños, también llamados tanques duros (debido a su capacidad para soportar una presión más alta), o tanques de compensación. La cantidad de agua en los tanques de control de profundidad puede controlarse para cambiar la profundidad o mantener una profundidad constante a medida que cambian las condiciones externas (principalmente la densidad del agua). Los tanques de control de profundidad pueden ubicarse ya sea cerca del centro de gravedad del submarino o separados a lo largo del cuerpo del submarino para evitar afectar el trimado.
Cuando se sumerge, la presión del agua en el casco de un submarino puede alcanzar 4 MPa (580 psi) para submarinos de acero y hasta 10 MPa (1,500 psi) para submarinos de titanio como K-278 Komsomolets , mientras que la presión interior permanece relativamente sin cambios. Esta diferencia da como resultado la compresión del casco, que disminuye el desplazamiento. La densidad del agua también aumenta marginalmente con la profundidad, ya que la salinidad y la presión son más altas. Este cambio en la densidad compensa de forma incompleta la compresión del casco, por lo que la flotabilidad disminuye a medida que aumenta la profundidad. Un submarino sumergido se encuentra en un equilibrio inestable, con tendencia a hundirse o flotar hacia la superficie. Mantener una profundidad constante requiere el funcionamiento continuo de los tanques de control de profundidad o las superficies de control.
Los submarinos en condiciones de flotabilidad neutra no son intrínsecamente estables. Para mantener el corte deseado, los submarinos usan tanques de guarnición delanteros y posteriores. Las bombas pueden mover agua entre los tanques, cambiar la distribución de peso y apuntar hacia arriba o hacia abajo. Un sistema similar se usa a veces para mantener la estabilidad.

El efecto hidrostático de los tanques de lastre variable no es la única forma de controlar el submarino bajo el agua. La maniobra hidrodinámica es realizada por varias superficies, que pueden moverse para crear fuerzas hidrodinámicas cuando un submarino se mueve a una velocidad suficiente. Los aviones de popa, ubicados cerca de la hélice y normalmente horizontales, tienen el mismo propósito que los tanques de compensación, controlan la guarnición, y se usan comúnmente, mientras que otras superficies de control pueden no estar presentes en todos los submarinos. Los planos de fairwater en la vela y / o los planos de proa en el cuerpo principal, ambos también horizontales, están más cerca del centro de gravedad y se usan para controlar la profundidad con menos efecto en el borde.
Cuando un submarino realiza una superficie de emergencia, todos los métodos de profundidad y recorte se utilizan simultáneamente, junto con propulsar el bote hacia arriba. Tal superficie es muy rápida, por lo que el submarino puede saltar parcialmente fuera del agua, lo que podría dañar los sistemas submarinos.
Cáscara
Visión de conjunto

Los submarinos modernos tienen forma de cigarro. Este diseño, visible en los primeros submarinos, a veces se denomina "casco en forma de lágrima". Reduce el arrastre hidrodinámico cuando está sumergido, pero disminuye las capacidades de mantenimiento del mar y aumenta el arrastre mientras sale a la superficie. Debido a que las limitaciones de los sistemas de propulsión de los primeros submarinos los obligaban a funcionar, la mayoría de las veces, los diseños de sus cascos eran un compromiso. Debido a la lentitud de las velocidades sumergidas de esos submarinos, generalmente muy por debajo de 10 kt (18 km / h), el arrastre incrementado para viajes bajo el agua era aceptable. A fines de la Segunda Guerra Mundial, cuando la tecnología permitió una operación más rápida y sumergida y una mayor vigilancia de la aeronave forzó a los submarinos a permanecer sumergidos, los diseños del casco se volvieron forma de lágrima nuevamente para reducir la resistencia y el ruido. USS Albacora (AGSS-569) fue un submarino de investigación único que fue pionero en la versión estadounidense de la forma de casco en forma de lágrima (a veces denominado "casco de albacora") de los submarinos modernos. En los submarinos militares modernos, el casco exterior está cubierto con una capa de caucho que absorbe el sonido, o un revestimiento anecoico, para reducir la detección.
Los cascos de presión ocupados de los submarinos de buceo profundo como DSV Alvin son esféricos en vez de cilíndricos. Esto permite una distribución más uniforme del estrés a gran profundidad. Por lo general, se coloca un marco de titanio en el casco a presión, lo que proporciona un accesorio para los sistemas de balasto y trimado, instrumentación científica, paquetes de baterías, espuma de flotación sintáctica e iluminación.
Una torre elevada sobre un submarino acomoda los mástiles de periscopio y de electrónica, que pueden incluir radio, radar, guerra electrónica y otros sistemas, incluido el mástil de snorkel. En muchas clases tempranas de submarinos (ver historia), la sala de control, o "conn", se encontraba dentro de esta torre, que era conocida como la "torre de maniobras". Desde entonces, la conn se ha ubicado dentro del casco del submarino, y la torre se llama ahora "vela". La conexión es distinta del "puente", una pequeña plataforma abierta en la parte superior de la vela, que se utiliza para la observación durante el funcionamiento de la superficie.
Las "bañeras" están relacionadas con torres de maniobras pero se usan en submarinos más pequeños. La bañera es un cilindro de metal que rodea la escotilla que evita que las olas se rompan directamente en la cabina. Es necesario porque los submarinos con superficie tienen francobordo limitado, es decir, se encuentran bajos en el agua. Las bañeras ayudan a evitar el hundimiento del recipiente.
Cascos simples y dobles

Los submarinos y sumergibles modernos, así como los más antiguos, generalmente tienen un solo casco. Los submarinos grandes generalmente tienen un casco adicional o secciones de casco en el exterior. Este casco externo, que en realidad tiene la forma de un submarino, se denomina casco externo ( carcasa de la Royal Navy) o casco ligero, ya que no tiene que soportar una diferencia de presión. Dentro del casco exterior hay un casco fuerte, o casco de presión, que soporta la presión del mar y tiene una presión atmosférica normal en el interior.
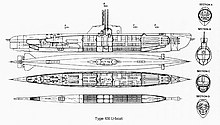
Ya en la Primera Guerra Mundial, se descubrió que la forma óptima para resistir la presión entraba en conflicto con la forma óptima para el mar y la resistencia mínima, y las dificultades de construcción complicaban aún más el problema. Esto fue resuelto ya sea por una forma de compromiso, o mediante el uso de dos cascos; interno para mantener la presión, y externo para una forma óptima. Hasta el final de la Segunda Guerra Mundial, la mayoría de los submarinos tenían una cubierta parcial adicional en la parte superior, proa y popa, construida con metal más delgado, que se inundó cuando se sumergió. Alemania fue más allá con el Type XXI, un predecesor general de los submarinos modernos, en el que el casco a presión estaba completamente encerrado dentro del casco ligero, pero optimizado para navegación sumergida, a diferencia de los diseños anteriores que fueron optimizados para la operación en superficie.
Después de la Segunda Guerra Mundial, los enfoques se dividen. La Unión Soviética cambió sus diseños, basándolos en desarrollos alemanes. Todos los submarinos pesados soviéticos y rusos posteriores a la Segunda Guerra Mundial están construidos con una doble estructura de casco. Los submarinos estadounidenses y la mayoría de los demás occidentales cambiaron a un enfoque principalmente de un solo casco. Todavía tienen secciones de casco ligero en proa y popa, que albergan tanques de lastre principales y proporcionan una forma hidrodinámica optimizada, pero la sección principal del casco cilíndrico tiene una sola capa de revestimiento. Cascos dobles se están considerando para futuros submarinos en los Estados Unidos para mejorar la capacidad de carga, el sigilo y el alcance.
Casco de presión

El casco a presión generalmente está construido de acero grueso de alta resistencia con una estructura compleja y una reserva de alta resistencia, y está separado con mamparos estancos en varios compartimentos. También hay ejemplos de más de dos cascos en un submarino, como la clase Typhoon, que tiene dos cascos de presión principales y tres más pequeños para la sala de control, torpedos y aparato de gobierno, con el sistema de lanzamiento de misiles entre los cascos principales.
La profundidad de inmersión no se puede aumentar fácilmente. Simplemente hacer que el casco sea más grueso aumenta el peso y requiere una reducción del peso del equipo de a bordo, lo que finalmente da como resultado un batiscafo . Esto es aceptable para los sumergibles de investigación civil, pero no para los submarinos militares.
Los submarinos de la Primera Guerra Mundial tenían cascos de acero al carbono, con una profundidad máxima de 100 metros (330 pies). Durante la Segunda Guerra Mundial, se introdujo acero aleado de alta resistencia, permitiendo profundidades de 200 metros (660 pies). El acero aleado de alta resistencia sigue siendo el material principal para los submarinos en la actualidad, con profundidades de 250-400 metros (820-1,310 pies), que no pueden excederse en un submarino militar sin compromisos de diseño. Para superar ese límite, algunos submarinos fueron construidos con cascos de titanio. El titanio puede ser más fuerte que el acero, más liviano y no ferromagnético, importante para el sigilo. Los submarinos de titanio fueron construidos por la Unión Soviética, que desarrolló aleaciones especializadas de alta resistencia. Ha producido varios tipos de submarinos de titanio. Las aleaciones de titanio permiten un mayor aumento de la profundidad, pero otros sistemas deben rediseñarse para adaptarse, por lo que la profundidad de la prueba se limitó a 1,000 metros (3, K-278 Komsomolets , el submarino de combate de buceo más profundo. Un submarino clase Alfa puede haber operado con éxito a 1.300 metros (4.300 pies), aunque la operación continua a tales profundidades produciría un estrés excesivo en muchos sistemas submarinos. El titanio no se flexiona tan fácilmente como el acero, y puede volverse quebradizo después de muchos ciclos de inmersión. A pesar de sus beneficios, el alto costo de la construcción de titanio llevó al abandono de la construcción de submarinos de titanio cuando terminó la Guerra Fría. Los submarinos civiles que bucean profundamente han usado cascos de presión acrílicos gruesos.
El vehículo de inmersión profunda más profundo (DSV) hasta la fecha es Trieste . El 5 de octubre de 1959, Trieste partió de San Diego hacia Guam a bordo del carguero Santa María para participar en el Proyecto Nekton , una serie de inmersiones muy profundas en la Fosa de las Marianas. El 23 de enero de 1960, Trieste llegó al fondo del océano en el Challenger Deep (la parte más profunda del sur de la Fosa de las Marianas), llevando a Jacques Piccard (hijo de Auguste) y al teniente Don Walsh, USN. Esta fue la primera vez que un barco, tripulado o no, había alcanzado el punto más profundo de los océanos de la Tierra. Los sistemas a bordo indicaron una profundidad de 11,521 metros (37,799 pies), aunque luego se revisó a 10,916 metros (35,814 pies) y las mediciones más precisas realizadas en 1995 encontraron el Challenger Deep ligeramente menos profundo, a 10,911 metros (35,797 pies).
Construir un casco a presión es difícil, ya que debe resistir las presiones en la profundidad de inmersión requerida. Cuando el casco es perfectamente redondo en la sección transversal, la presión se distribuye uniformemente y solo causa la compresión del casco. Si la forma no es perfecta, el casco está doblado, con varios puntos fuertemente forzados. Las desviaciones menores inevitables son resistidas por los anillos de refuerzo, pero incluso una desviación de una pulgada (25 mm) de la redondez da como resultado una disminución de más del 30 por ciento de la carga hidrostática máxima y, en consecuencia, la profundidad de inmersión. Por lo tanto, el casco debe construirse con alta precisión. Todas las piezas del casco deben soldarse sin defectos, y todas las juntas se controlan varias veces con diferentes métodos, lo que contribuye al alto costo de los submarinos modernos. (Por ejemplo, cada Virginiael submarino de clase alta cuesta US $ 2.6 mil millones, más de US $ 200,000 por tonelada de desplazamiento).
Propulsión

Los primeros submarinos fueron propulsados por humanos. El primer submarino de accionamiento mecánico fue el Plongeurfrancés de 1863 , que utilizó aire comprimido para la propulsión. La propulsión anaeróbica fue empleada por primera vez por el español Ictineo II en 1864, que utilizó una solución de zinc, dióxido de manganeso y clorato de potasio para generar suficiente calor para alimentar una máquina de vapor, mientras que también proporcionaba oxígeno a la tripulación. Un sistema similar no fue empleado nuevamente hasta 1940 cuando la Armada alemana probó un sistema basado en peróxido de hidrógeno, la turbina Walter, en el submarino experimental V-80 y más tarde en los submarinos navales U-791 y tipo XVII.
Hasta el advenimiento de la propulsión marina nuclear, la mayoría de los submarinos del siglo XX usaban baterías para funcionar bajo el agua y gasolina (gasolina) o dieselengines en la superficie y para recargar la batería. Los primeros submarinos usaban gasolina, pero esto rápidamente dio paso al queroseno (parafina), luego al diesel, debido a la inflamabilidad reducida. Diesel-eléctrico se convirtió en el medio estándar de propulsión. El motor diésel o de gasolina y el motor eléctrico, separados por embragues, estaban inicialmente en el mismo eje que accionaba la hélice. Esto permitió que el motor condujera el motor eléctrico como generador para recargar las baterías y también propulsar el submarino. El embrague entre el motor y el motor se desconectaría cuando el submarino se sumergiera, de modo que el motor pudiera conducir la hélice. El motor podría tener múltiples armaduras en el eje,
Diesel-eléctrico

Los primeros submarinos usaban una conexión mecánica directa entre el motor y la hélice, alternando entre los motores diesel para el funcionamiento en superficie y los motores eléctricos propulsados por batería para la propulsión sumergida.
En 1928, la Oficina de Ingeniería de la Marina de los Estados Unidos propuso una transmisión diesel-eléctrica. En lugar de conducir la hélice directamente mientras corría en la superficie, el diesel del submarino conducía un generador que podía cargar las baterías del submarino o conducir el motor eléctrico. Esto hizo que la velocidad del motor eléctrico fuera independiente de la velocidad del motor diesel, por lo que el diesel podría funcionar a una velocidad óptima y no crítica. Uno o más motores diesel pueden ser apagados para mantenimiento mientras el submarino continúa funcionando con la potencia restante de la batería o del motor. Estados Unidos fue pionero en este concepto en 1929, en los submarinos clase S S-3 , S-6 y S-7 . Los primeros submarinos de producción con este sistema fueron la marsopa clase de la década de 1930, y se utilizó en la mayoría de los subsecuentes submarinos diesel de EE. UU. hasta la década de 1960. Ninguna otra armada adoptó el sistema antes de 1945, aparte de los submarinos clase-U de la Marina Real, aunque algunos submarinos de la Armada Imperial Japonesa usaron generadores diesel separados para carreras a baja velocidad.
Otras ventajas de tal disposición eran que un submarino podía viajar lentamente con los motores a plena potencia para recargar las baterías rápidamente, reduciendo el tiempo en la superficie o haciendo snorkel. Entonces fue posible aislar los ruidosos motores diesel del casco a presión, haciendo que el submarino permaneciera más silencioso. Además, las transmisiones diesel-eléctricas eran más compactas.
Durante la Segunda Guerra Mundial, los alemanes experimentaron con la idea del schnorchel (snorkel) de los submarinos holandeses capturados, pero no vieron la necesidad de ellos hasta bastante tarde en la guerra. El schnorchel era un tubo retráctil que suministraba aire a los motores diesel mientras se sumergía a la profundidad del periscopio, lo que permitía a los barcos navegar y recargar sus baterías mientras se mantenía un grado de sigilo. Sin embargo, estaba lejos de ser una solución perfecta. Hubo problemas con la válvula del dispositivo que se cerraba o se cerraba cuando se sumergía en condiciones climáticas adversas; dado que el sistema usaba todo el casco de presión como amortiguador, los motores diesel succionaban instantáneamente grandes volúmenes de aire de los compartimientos del barco, y la tripulación a menudo sufría lesiones dolorosas en el oído. La velocidad se limitó a 8 nudos (15 km / h), por temor a que el dispositivo se desconecte del estrés. El schnorchel también creó un ruido que hizo que la embarcación fuera más fácil de detectar con el sonar, pero aún más difícil para el sonar a bordo para detectar señales de otras embarcaciones. Finalmente, el radar aliado finalmente se hizo lo suficientemente avanzado como para poder detectar el mástil schnorchel más allá del alcance visual.
Mientras que el snorkel hace que un submarino sea mucho menos detectable, no es perfecto. Cuando hace buen tiempo, se pueden ver los escapes de diesel en la superficie a una distancia de aproximadamente tres millas, mientras que la "pluma de periscopio" (la onda creada por el tubo o el periscopio que se mueve a través del agua) es visible desde lejos en condiciones de mar en calma. El radar moderno también es capaz de detectar un snorkel en condiciones de mar en calma.
El problema de los motores diesel que causan un vacío en el submarino cuando la válvula de cabeza está sumergida todavía existe en los submarinos diesel modelo posteriores, pero se mitiga con sensores de alto vacío que apagan los motores cuando el vacío en el barco alcanza un pre -punto fijo. Los mástiles de inducción de esnórquel modernos utilizan un diseño a prueba de fallas utilizando aire comprimido, controlado por un circuito eléctrico simple, para mantener la "válvula de la cabeza" abierta contra la fuerza de un resorte potente. El agua de mar que se lava sobre el mástil corta los electrodos expuestos en la parte superior, rompiendo el control y cerrando la "válvula de la cabeza" mientras está sumergida.
Independiente del aire

Durante la Segunda Guerra Mundial, los submarinos alemanes de tipo XXI (también conocidos como " Elektroboote ") fueron los primeros submarinos diseñados para operar sumergidos durante períodos prolongados. Inicialmente debían transportar peróxido de hidrógeno para una propulsión rápida e independiente del aire a largo plazo, pero finalmente se construyeron con baterías muy grandes. Al final de la guerra, los británicos y los soviéticos experimentaron con motores de peróxido de hidrógeno / queroseno (parafina) que podrían correr a la superficie y sumergidos. Los resultados no fueron alentadores. Aunque la Unión Soviética desplegó una clase de submarinos con este tipo de motor (con el nombre en código Quebec de la OTAN), se consideraron infructuosos.

Los Estados Unidos también usaron peróxido de hidrógeno en un submarino enano experimental, X-1. Originalmente fue impulsado por un motor de peróxido de hidrógeno / diesel y un sistema de batería hasta una explosión de su suministro de peróxido de hidrógeno el 20 de mayo de 1957. X-1 se convirtió más tarde para utilizar el accionamiento diesel-eléctrico.
Hoy en día, varias armadas utilizan propulsión independiente del aire. Cabe destacar que Suecia utiliza la tecnología Stirling en la clase Gotland y en los submarinos de clase Södermanland . El motor Stirling se calienta quemando combustible diesel con oxígeno líquido de tanques criogénicos. Un desarrollo más reciente en la propulsión independiente del aire son las células de combustible de hidrógeno, usadas por primera vez en el submarino alemán Tipo 212, con nueve 34 kW o dos celdas de 120 kW y que pronto serán utilizadas en los nuevos submarinos españoles de la clase S-80.
La energía nuclear

El poder del vapor fue resucitado en la década de 1950 con una turbina de vapor de propulsión nuclear que conducía un generador. Al eliminar la necesidad de oxígeno atmosférico, el tiempo que un submarino podía permanecer sumergido estaba limitado solo por sus tiendas de alimentos, ya que el aire respirable se reciclaba y el agua dulce se destilaba del agua de mar. Más importante aún, un submarino nuclear tiene un alcance ilimitado a máxima velocidad. Esto le permite viajar desde su base de operaciones a la zona de combate en un tiempo mucho más corto y lo convierte en un objetivo mucho más difícil para la mayoría de las armas antisubmarinas. Los submarinos de propulsión nuclear tienen una batería relativamente pequeña y un motor / generador diesel para uso de emergencia si los reactores se deben apagar.

La energía nuclear ahora se usa en todos los submarinos grandes, pero debido al alto costo y al gran tamaño de los reactores nucleares, los submarinos más pequeños todavía usan propulsión diesel-eléctrica. La proporción de submarinos más grandes a más pequeños depende de las necesidades estratégicas. La Marina de los EE. UU., La Armada francesa y la Marina Real Británica operan solo submarinos nucleares, lo que se explica por la necesidad de operaciones distantes. Otros operadores importantes dependen de una combinación de submarinos nucleares con fines estratégicos y submarinos diesel-eléctricos para la defensa. La mayoría de las flotas no tienen submarinos nucleares, debido a la limitada disponibilidad de energía nuclear y tecnología submarina.
Los submarinos diesel-eléctricos tienen una ventaja sigilosa sobre sus contrapartes nucleares. Los submarinos nucleares generan ruido a partir de las bombas de refrigerante y la maquinaria turbo que se necesitan para operar el reactor, incluso a bajos niveles de potencia. Algunos submarinos nucleares como la clase estadounidense de Ohio pueden operar con sus bombas de refrigerante del reactor aseguradas, lo que las hace más silenciosas que los submarinos eléctricos. Un submarino convencional que funciona con baterías es casi completamente silencioso, el único ruido proviene de los cojinetes del eje, la hélice y el ruido del flujo alrededor del casco, todo lo cual se detiene cuando el submarinista se detiene en medio del agua para escuchar, dejando solo el ruido de la tripulación actividad. Los submarinos comerciales normalmente solo utilizan baterías, ya que funcionan en conjunción con una nave nodriza.
Varios accidentes nucleares y de radiación graves han implicado percances de submarinos nucleares. El accidente del reactor submarino soviético K-19 en 1961 resultó en 8 muertes y más de 30 personas estaban sobreexpuestas a la radiación. El accidente del reactor submarino soviético K-27 en 1968 resultó en 9 muertes y otras 83 lesiones. El accidente del submarino soviético K-431 en 1985 resultó en 10 muertes y otras 49 lesiones por radiación.
Alternativa
Los submarinos de la clase K británicos, construidos durante la Primera Guerra Mundial y más tarde, les proporcionaron velocidad superficial para mantenerse al día con la flota de batalla. Sin embargo, los subs de clase K no tuvieron mucho éxito.
Hacia el final del siglo 20, algunos submarinos, como la clase Vanguard británica , comenzaron a estar equipados con propulsores de bomba en lugar de hélices. Aunque son más pesados, más caros y menos eficientes que una hélice, son significativamente más silenciosos, lo que proporciona una importante ventaja táctica.
La transmisión magnetohidrodinámica (MHD) se describió como el principio de funcionamiento detrás del sistema de propulsión casi silencioso del submarino titular en la adaptación cinematográfica de The Hunt for Red October . Sin embargo, en la novela, el Octubre Rojo no usó MHD, sino algo más similar al jet de bomba antes mencionado.
Armamento
El éxito del submarino está inextricablemente ligado al desarrollo del torpedo, inventado por Robert Whitehead en 1866. Su invención es esencialmente la misma ahora que hace 140 años. Solo con torpedos autopropulsados podría el submarino dar el salto de la novedad a un arma de guerra. Hasta la perfección del torpedo guiado, se requerían múltiples torpedos "de carrera recta" para atacar a un objetivo. Con un máximo de 20 a 25 torpedos almacenados a bordo, el número de ataques fue limitado. Para aumentar la resistencia de combate, la mayoría de los submarinos de la Primera Guerra Mundial funcionaban como cañoneras sumergibles, utilizando sus pistolas de cubierta contra objetivos desarmados y buceando para escapar y atacar naves de guerra enemigas. La importancia de las armas motivó el desarrollo del Crucero Submarino sin éxito, como el Surcouffrancés y la Royal Navy ' Submarinos X1 y clase M Con la llegada de los aviones de guerra antisubmarina (ASW), las armas se volvieron más para la defensa que para el ataque. Un método más práctico para aumentar la resistencia de combate fue el tubo de torpedo externo, cargado solo en el puerto.

La capacidad de los submarinos para acercarse a los puertos enemigos de forma encubierta llevó a su uso como mineros. Los submarinos de la Primera Guerra Mundial y la Segunda Guerra Mundial fueron construidos especialmente para ese propósito. Las modernas minas submarinas, como las británicas Mark 5 Stonefish y Mark 6 Sea Urchin, pueden desplegarse desde los tubos de torpedos de un submarino.
Después de la Segunda Guerra Mundial, tanto EE. UU. Como la URSS experimentaron con misiles de crucero lanzados desde submarinos como SSM-N-8 Regulus y P-5 Pyatyorka. Tales misiles requerían que el submarino saliera a la superficie para disparar sus misiles. Ellos fueron los precursores de los modernos misiles de crucero lanzados por submarinos, que pueden ser disparados desde los tubos de torpedos de los submarinos sumergidos, por ejemplo, el US BGM-109 Tomahawk y el ruso RPK-2 Viyuga y las versiones de misiles antibuque de superficie a superficie como el Exocet y Harpoon, encapsulado para lanzamiento submarino. Los misiles balísticos también se pueden disparar desde los tubos de torpedos de un submarino, por ejemplo, misiles como el SUBROC antisubmarino. Con el volumen interno tan limitado como siempre y el deseo de llevar cargas de guerra más pesadas, la idea del tubo de lanzamiento externo se revivió, por lo general para misiles encapsulados,
La misión estratégica del SSM-N-8 y del P-5 fue absorbida por misiles balísticos lanzados desde submarinos, comenzando con el misil Polaris de la Marina de los EE. UU. Y, posteriormente, los misiles Poseidón y Tridente.
Alemania está trabajando en el misil IDAS de corto alcance lanzado con un tubo de torpedo, que se puede utilizar contra helicópteros ASW, así como con buques de superficie y objetivos costeros.
Sensores
Un submarino puede tener una variedad de sensores, dependiendo de sus misiones. Los submarinos militares modernos dependen casi por completo de un conjunto de sonares pasivos y activos para localizar objetivos. El sonar activo se basa en un "ping" audible para generar ecos y revelar objetos alrededor del submarino. Los sistemas activos rara vez se utilizan, ya que al hacerlo se revela la presencia del submarino. El sonar pasivo es un conjunto de hidrófonos sensibles instalados en el casco o arrastrados en un conjunto remolcado, normalmente a varios cientos de pies detrás del submarino. El conjunto remolcado es el pilar de los sistemas de detección submarinos de la OTAN, ya que reduce el ruido de flujo escuchado por los operadores. El sonar montado en el casco se emplea además del conjunto remolcado, ya que el conjunto remolcado no puede trabajar a poca profundidad y durante las maniobras. Además, el sonar tiene un punto ciego "a través" del submarino, entonces un sistema tanto en el frente como en la parte posterior funciona para eliminar ese problema. A medida que la hilera arrastrada se arrastra detrás y debajo del submarino, también permite que el submarino tenga un sistema tanto arriba como debajo de la termoclina a la profundidad adecuada; el sonido que pasa a través de la termoclina se distorsiona dando como resultado un rango de detección más bajo.
Los submarinos también llevan equipos de radar para detectar naves de superficie y aviones. Los capitanes submarinos son más propensos a usar el equipo de detección de radar que el radar activo para detectar objetivos, ya que el radar se puede detectar mucho más allá de su propio rango de retorno, revelando el submarino. Los periscopios rara vez se usan, excepto por las correcciones de posición y para verificar la identidad de un contacto.
Los submarinos civiles, como los sumergibles DSV Alvin o Russian Mir , dependen de pequeños conjuntos de sonares activos y puertos de observación para navegar. El ojo humano no puede detectar la luz solar debajo de unos 300 pies (91 m) bajo el agua, por lo que las luces de alta intensidad se utilizan para iluminar el área de visualización.

Los primeros submarinos tenían pocas ayudas para la navegación, pero los submarinos modernos tienen una variedad de sistemas de navegación. Los submarinos militares modernos usan un sistema de guía inercial para la navegación mientras están sumergidos, pero el error de deriva inevitablemente se construye con el tiempo. Para contrarrestar esto, la tripulación utiliza ocasionalmente el Sistema de Posicionamiento Global para obtener una posición precisa. El periscopio, un tubo retráctil con un sistema de prismas que proporciona una vista de la superficie, solo se usa ocasionalmente en submarinos modernos, ya que el rango de visibilidad es corto. La clase de Virginia y Astutelos submarinos de clase usan mástiles fotónicos en lugar de periscopios ópticos penetrantes en el casco. Estos mástiles aún deben desplegarse sobre la superficie y usar sensores electrónicos para la luz visible, infrarrojos, búsqueda de rango láser y vigilancia electromagnética. Una de las ventajas de elevar el mástil sobre la superficie es que mientras el mástil está sobre el agua, todo el submarino está todavía debajo del agua y es mucho más difícil de detectar visualmente o por radar.
Comunicación
Los submarinos militares usan varios sistemas para comunicarse con centros de comando distantes u otras naves. Una de ellas es la radio VLF (frecuencia muy baja), que puede alcanzar un submarino ya sea en la superficie o sumergida a una profundidad bastante poco profunda, por lo general a menos de 250 pies (76 m). ELF (frecuencia extremadamente baja) puede alcanzar un submarino a mayores profundidades, pero tiene un ancho de banda muy bajo y generalmente se usa para llamar a un submarino sumergido a una profundidad más superficial donde las señales de VLF pueden alcanzar. Un submarino también tiene la opción de flotar una antena de cable larga y flotante a una profundidad menor, lo que permite transmisiones de VLF mediante un barco profundamente sumergido.
Al extender un mástil de radio, un submarino también puede usar una técnica de "ráfaga de transmisión". Una transmisión en ráfaga solo demora una fracción de segundo, lo que minimiza el riesgo de detección de un submarino.
Para comunicarse con otros submarinos, se usa un sistema conocido como Gertrude. Gertrude es básicamente un teléfono de sonar. La comunicación de voz desde un submarino es transmitida por altavoces de baja potencia al agua, donde es detectada por los sonares pasivos en el submarino receptor. El alcance de este sistema es probablemente muy corto, y su uso irradia sonido al agua, que puede ser escuchado por el enemigo.
Los submarinos civiles pueden usar sistemas similares, aunque menos poderosos, para comunicarse con barcos de apoyo u otros sumergibles en el área.
Sistemas de soporte vital
Con la energía nuclear o la propulsión independiente del aire, los submarinos pueden permanecer sumergidos durante meses. Los submarinos diésel convencionales deben resurgir periódicamente o funcionar con esnórquel para recargar sus baterías. La mayoría de los submarinos militares modernos generan oxígeno para respirar por electrólisis de agua (usando un dispositivo llamado "Generador de oxígeno electrolítico"). El equipo de control de la atmósfera incluye un depurador de CO
2 , que utiliza un absorbente de amina para eliminar el gas del aire y difundirlo en los desechos que se bombean por la borda. Una máquina que usa un catalizador para convertir el monóxido de carbono en dióxido de carbono (eliminado por el CO 2 depurador) y enlaces de hidrógeno producido a partir de la batería de almacenamiento del barco con oxígeno en la atmósfera para producir agua, también se utiliza. Un sistema de monitoreo de la atmósfera toma muestras del aire de diferentes áreas de la nave en busca de nitrógeno, oxígeno, hidrógeno, refrigerantes R-12 y R-114, dióxido de carbono, monóxido de carbono y otros gases. Los gases venenosos se eliminan y el oxígeno se repone mediante el uso de un banco de oxígeno ubicado en un tanque de lastre principal. Algunos submarinos más pesados tienen dos estaciones de purga de oxígeno (hacia adelante y hacia atrás). El oxígeno en el aire algunas veces se mantiene un porcentaje menor que la concentración atmosférica para reducir el peligro de incendio.
2 , que utiliza un absorbente de amina para eliminar el gas del aire y difundirlo en los desechos que se bombean por la borda. Una máquina que usa un catalizador para convertir el monóxido de carbono en dióxido de carbono (eliminado por el CO 2 depurador) y enlaces de hidrógeno producido a partir de la batería de almacenamiento del barco con oxígeno en la atmósfera para producir agua, también se utiliza. Un sistema de monitoreo de la atmósfera toma muestras del aire de diferentes áreas de la nave en busca de nitrógeno, oxígeno, hidrógeno, refrigerantes R-12 y R-114, dióxido de carbono, monóxido de carbono y otros gases. Los gases venenosos se eliminan y el oxígeno se repone mediante el uso de un banco de oxígeno ubicado en un tanque de lastre principal. Algunos submarinos más pesados tienen dos estaciones de purga de oxígeno (hacia adelante y hacia atrás). El oxígeno en el aire algunas veces se mantiene un porcentaje menor que la concentración atmosférica para reducir el peligro de incendio.
El agua dulce es producida por un evaporador o una unidad de ósmosis inversa. El uso principal para el agua dulce es proporcionar agua de alimentación para el reactor y las plantas de propulsión de vapor. También está disponible para duchas, lavabos, cocina y limpieza una vez que se han cumplido las necesidades de la planta de propulsión. El agua de mar se usa para descargar los inodoros, y el "agua negra" resultante se almacena en un tanque sanitario hasta que se sopla por la borda con aire presurizado o se bombea por la borda utilizando una bomba sanitaria especial. El sistema de descarga de aguas negras es difícil de operar, y el barco alemán de tipo VIIC U-1206 se perdió con bajas debido a un error humano al usar este sistema. El agua de las duchas y lavabos se almacena por separado en tanques de "aguas grises" y se descarga por la borda utilizando bombas de drenaje.
La basura en los grandes submarinos modernos generalmente se desecha utilizando un tubo llamado Unidad de eliminación de basura (TDU), donde se compacta en una lata de acero galvanizado. En la parte inferior de la TDU hay una válvula de bola grande. Un tapón de hielo se coloca en la parte superior de la válvula de bola para protegerlo, las latas encima del tapón de hielo. La puerta de la recámara superior está cerrada, y la TDU se inunda y ecualiza con la presión del mar, la válvula de bola se abre y las latas caen asistidas por pesos de hierro desechado en las latas. El TDU también se purga con agua de mar para asegurarse de que esté completamente vacío y la válvula de bola esté despejada antes de cerrar la válvula.
Tripulación

Un submarino nuclear típico tiene una tripulación de más de 80; las embarcaciones convencionales suelen tener menos de 40. Las condiciones en un submarino pueden ser difíciles porque los miembros de la tripulación deben trabajar en aislamiento durante largos períodos de tiempo, sin contacto familiar. Los submarinos normalmente mantienen el silencio de la radio para evitar la detección. Operar un submarino es peligroso, incluso en tiempos de paz, y muchos submarinos se han perdido en accidentes.
Mujer

La mayoría de las marinas prohibieron a las mujeres servir en submarinos, incluso después de que se les hubiera permitido servir en buques de guerra de superficie. La Royal Navy noruega se convirtió en la primera armada en permitir a las mujeres en sus equipos submarinos en 1985. La Royal Danish Navy permitió a las mujeres submarinistas en 1988. Otros siguieron su ejemplo, incluyendo la Armada sueca (1989), la Royal Australian Navy (1998), la Armada española (1999), la Armada alemana (2001) y la Armada canadiense (2002). En 1995, Solveig Krey, de la Royal Navy noruega, se convirtió en la primera mujer en asumir el mando de un submarino militar, HNoMS Kobben .
El 8 de diciembre de 2011, el Secretario de Defensa británico Philip Hammond anunció que la prohibición del Reino Unido a las mujeres en submarinos debía levantarse a partir de 2013. Anteriormente existían temores de que las mujeres estuvieran en mayor riesgo por la acumulación de dióxido de carbono en el submarino. Pero un estudio no mostró razones médicas para excluir a las mujeres, aunque las mujeres embarazadas aún serían excluidas. Peligros similares a la mujer embarazada y su feto excluyeron a las mujeres del servicio submarino en Suecia en 1983, cuando todas las demás posiciones se pusieron a su disposición en la Armada sueca. Hoy en día, las mujeres embarazadas todavía no pueden trabajar en submarinos en Suecia. Sin embargo, los diseñadores de políticas pensaron que era discriminatorio con una prohibición general y exigieron que las mujeres sean juzgadas por sus propios méritos y que su idoneidad sea evaluada y comparada con otros candidatos. Promover, señalaron que es poco probable que una mujer que cumpla con altas exigencias quede embarazada. En mayo de 2014, tres mujeres se convirtieron en las primeras mujeres submarinistas de la RN.
Las mujeres han servido en buques de superficie de la Marina de los EE. UU. Desde 1993 y, a partir de 2011-2012, comenzaron a prestar servicios en submarinos por primera vez. Hasta ahora, la Marina permitía solo tres excepciones para mujeres a bordo de submarinos militares: mujeres técnicas civiles durante unos días como máximo, mujeres guardiamarinas durante la noche durante el entrenamiento de verano para el Navy ROTC y la Academia Naval, y miembros de la familia para dependientes de un día cruceros. En 2009, altos funcionarios, incluido el entonces Secretario de la Marina, Ray Mabus, el Jefe de Estado Mayor Conjunto, Almirante Michael Mullen, y el Jefe de Operaciones Navales, Almirante Gary Roughead, comenzaron el proceso de encontrar una forma de implementar a las hembras en submarinos. La Marina de los Estados Unidos rescindió su política de "no mujeres en submarinos" en 2010.
Tanto las armadas de EE. UU. Como las británicas operan submarinos de propulsión nuclear que se despliegan por períodos de seis meses o más. Otras marinas que permiten que las mujeres sirvan en submarinos operan submarinos de propulsión convencional, que se despliegan durante períodos mucho más cortos, generalmente solo durante unos pocos meses. Antes del cambio en los Estados Unidos, ninguna nación que utilizara submarinos nucleares permitió que las mujeres prestaran servicios a bordo.
En 2011, la primera clase de oficiales submarinos se graduó del Curso Básico Submarino de la Escuela Submarina Naval (SOBC) en la Base Submarina Naval de Nueva Londres. Además, también asistieron más SOBC y mujeres experimentadas en suministros de la especialidad de guerra de superficie. procediendo a la flota de misiles balísticos (SSBN) y Misiles Guiados (SSGN) junto con los nuevos oficiales de línea submarinos femeninos a partir de finales de 2011. A fines de 2011, varias mujeres fueron asignadas al submarino de misiles balísticos de Ohio USS Wyoming . El 15 de octubre de 2013, la Marina de los EE. UU. Anunció que dos de los submarinos de ataque de clase más pequeños de Virginia , el USS Virginia y el USS Minnesota, tendría mujeres tripulantes para enero de 2015.
Abandonando el barco
En una emergencia, los submarinos pueden transmitir una señal a otras naves. La tripulación puede usar el Equipo de Inmersión de Escape Submarino para abandonar el submarino. La tripulación puede prevenir una lesión pulmonar por el cambio de presión conocido como barotrauma pulmonar al exhalar durante el ascenso. Después de escapar de un submarino presurizado, la tripulación corre el riesgo de desarrollar una enfermedad de descompresión. Un medio de escape alternativo es a través de un vehículo de rescate de inmersión profunda que puede atracar en el submarino discapacitado.