Impulso
Definición
| Impulso | |
|---|---|
 El ímpetu de una bola blanca de billar se transfiere a las bolas atormentadas después de la colisión. | |

En unidades SI, se mide en kilogramos por segundo (kg⋅m / s). La segunda ley del movimiento de Newton establece que la tasa de cambio de un cuerpo en el momento es igual a la fuerza neta que actúa sobre él.
El momento depende del marco de referencia, pero en cualquier marco inercial es una cantidad conservada , lo que significa que si un sistema cerrado no se ve afectado por fuerzas externas, su momento lineal total no cambia. El impulso también se conserva en la relatividad especial (con una fórmula modificada) y, en una forma modificada, en la electrodinámica, la mecánica cuántica, la teoría cuántica de campos y la relatividad general. Es una expresión de una de las simetrías fundamentales del espacio y el tiempo: la simetría traslacional.
Las formulaciones avanzadas de mecánica clásica, mecánica lagrangiana y hamiltoniana, permiten elegir sistemas de coordenadas que incorporan simetrías y restricciones. En estos sistemas, la cantidad conservada es el impulso generalizado y, en general, es diferente del momento cinéticodefinido anteriormente. El concepto de impulso generalizado se traslada a la mecánica cuántica, donde se convierte en un operador en una función de onda. Los operadores de momento y posición están relacionados por el principio de incertidumbre de Heisenberg.
En sistemas continuos tales como campos electromagnéticos, fluidos y cuerpos deformables, se puede definir una densidad de momento, y una versión continua de la conservación del momento conduce a ecuaciones como las ecuaciones de Navier-Stokes para fluidos o la ecuación de momento de Cauchy para sólidos deformables o fluidos.
Newtoniano
Momentum es una cantidad vectorial: tiene tanto magnitud como dirección. Como el impulso tiene una dirección, puede usarse para predecir la dirección y la velocidad de movimiento resultantes de los objetos después de colisionar. A continuación, las propiedades básicas del impulso se describen en una dimensión. Las ecuaciones de vectores son casi idénticas a las ecuaciones escalares (ver dimensiones múltiples).
Partícula individual
El impulso de una partícula se representa convencionalmente por la letra p . Es el producto de dos cantidades, la masa de la partícula (representada por la letra m ) y su velocidad ( v ):

La unidad de impulso es el producto de las unidades de masa y velocidad. En unidades SI, si la masa está expresada en kilogramos y la velocidad es en metros por segundo, entonces el impulso está expresado en kilogramos por segundo (kg⋅m / s). En las unidades cgs, si la masa está en gramos y la velocidad en centímetros por segundo, entonces el impulso está en gramos por segundo (g⋅cm / s).
Al ser un vector, el impulso tiene magnitud y dirección. Por ejemplo, un avión modelo de 1 kg, viajando hacia el norte a 1 m / s en vuelo recto y nivelado, tiene un impulso de 1 kg⋅m / s hacia el norte medido con referencia al suelo.
Muchas partículas
El impulso de un sistema de partículas es la suma de sus momentos. Si dos partículas tienen masas respectivas m 1 y m 2 , y velocidades v 1 y v 2 , el impulso total es

El momento de más de dos partículas se puede agregar de manera más general con lo siguiente:

Un sistema de partículas tiene un centro de masa, un punto determinado por la suma ponderada de sus posiciones:

Si todas las partículas se están moviendo, el centro de masa generalmente se moverá también (a menos que el sistema esté en rotación pura alrededor de él). Si el centro de masa se mueve a una velocidad v cm , el impulso es:

Esto se conoce como la primera ley de Euler.
Relación con la fuerza
Si la fuerza neta aplicada a una partícula es una constante F , y se aplica durante un intervalo de tiempo Δ t , el impulso de los cambios de partículas en una cantidad

En forma diferencial, esta es la segunda ley de Newton; la tasa de cambio del momento de una partícula es igual a la fuerza instantánea F que actúa sobre ella,

Si la fuerza neta experimentada por un cambio de partículas como una función del tiempo, F (t) , el cambio en el momento (o impulso J ) entre los tiempos t 1 y t 2 es

El impulso se mide en las unidades derivadas del segundo newton (1 N⋅s = 1 kg⋅m / s) o el segundo dyne⋅s (1 dyne⋅s = 1 g⋅m / s)
Bajo el supuesto de una masa constante m , es equivalente a escribir

de ahí que la fuerza neta sea igual a la masa de la partícula, multiplicada por su aceleración.
Ejemplo : un avión modelo de masa 1 kg acelera desde el reposo a una velocidad de 6 m / s hacia el norte en 2 s. La fuerza neta requerida para producir esta aceleración es de 3 newtonsdue al norte. El cambio en el momento es de 6 kg⋅m / s. La tasa de cambio de momento es 3 (kg⋅m / s) / s = 3 N.
Conservación
En un sistema cerrado (uno que no intercambia ninguna materia con su entorno y no es actuado por fuerzas externas), el impulso total es constante. Este hecho, conocido como la ley de conservación del momento , está implícito en las leyes del movimiento de Newton. Supongamos, por ejemplo, que dos partículas interactúan. Debido a la tercera ley, las fuerzas entre ellos son iguales y opuestas. Si las partículas están numeradas 1 y 2, la segunda ley establece que F 1 = dp 1dt y F 2 = dp 2dt . Por lo tanto,

con el signo negativo que indica que las fuerzas se oponen. Equivalentemente,

Si las velocidades de las partículas son u 1 y u 2 antes de la interacción, y después son v 1 y v 2 , a continuación,

Esta ley se cumple sin importar cuán complicada sea la fuerza entre las partículas. De forma similar, si hay varias partículas, el impulso intercambiado entre cada par de partículas se suma a cero, por lo que el cambio total en la cantidad de movimiento es cero. Esta ley de conservación se aplica a todas las interacciones, incluidas las colisiones y separaciones causadas por fuerzas explosivas. También se puede generalizar a situaciones donde las leyes de Newton no se cumplen, por ejemplo en la teoría de la relatividad y en la electrodinámica.
Dependencia del marco de referencia

El momento es una cantidad mensurable, y la medida depende del movimiento del observador. Por ejemplo: si una manzana está sentada en un elevador de vidrio que desciende, un observador externo, mirando hacia el elevador, ve que la manzana se mueve, entonces, para ese observador, la manzana tiene un impulso distinto de cero. Para alguien dentro del ascensor, la manzana no se mueve, por lo tanto, tiene impulso cero. Cada uno de los dos observadores tiene un marco de referencia en el que observan los movimientos y, si el ascensor desciende de manera constante, verán un comportamiento que es consistente con esas mismas leyes físicas.
Supongamos que una partícula tiene una posición x en un marco de referencia estacionario. Desde el punto de vista de otro marco de referencia, moviéndose a una velocidad uniforme u , la posición (representada por una coordenada imprimada) cambia con el tiempo como

Esto se llama transformación galileana. Si la partícula se mueve a la velocidad dxdt = v en el primer marco de referencia, en el segundo, se está moviendo a la velocidad

Como u no cambia, las aceleraciones son las mismas:

Por lo tanto, el momento se conserva en ambos marcos de referencia. Además, mientras la fuerza tenga la misma forma, en ambos cuadros, la segunda ley de Newton no cambia. Fuerzas como la gravedad newtoniana, que dependen solo de la distancia escalar entre los objetos, satisfacen este criterio. Esta independencia del marco de referencia se llama relatividad newtoniana o invarianza galileana.
Un cambio de marco de referencia puede, a menudo, simplificar los cálculos de movimiento. Por ejemplo, en una colisión de dos partículas, se puede elegir un marco de referencia, donde una partícula comienza en reposo. Otro marco de referencia comúnmente utilizado es el centro del marco de masa, que se mueve con el centro de masa. En este marco, el impulso total es cero.
Aplicación a colisiones
Por sí mismo, la ley de conservación del impulso no es suficiente para determinar el movimiento de las partículas después de una colisión. Se debe conocer otra propiedad del movimiento, la energía cinética. Esto no necesariamente se conserva. Si se conserva, la colisión se denomina colisión elástica ; si no, es una colisión inelástica .
Colisiones elásticas
Una colisión elástica es aquella en la que no se absorbe energía cinética en la colisión. Se pueden producir "colisiones" perfectamente elásticas cuando los objetos no se tocan entre sí, como por ejemplo en la dispersión atómica o nuclear donde la repulsión eléctrica los mantiene separados. Una maniobra de tirachinas de un satélite alrededor de un planeta también se puede ver como una colisión perfectamente elástica. Una colisión entre dos bolas de piscina es un buen ejemplo de una colisión casi totalmente elástica, debido a su alta rigidez, pero cuando los cuerpos entran en contacto siempre hay algo de disipación.
Una colisión frontal elástica entre dos cuerpos se puede representar por las velocidades en una dimensión, a lo largo de una línea que pasa a través de los cuerpos. Si las velocidades son u 1 y u 2 antes de la colisión y v 1 y v 2 después, las ecuaciones que expresan la conservación del momento y la energía cinética son:

Un cambio de marco de referencia puede simplificar el análisis de una colisión. Por ejemplo, supongamos que hay dos cuerpos de igual masa m , uno estacionario y uno que se aproxima al otro a una velocidad v (como en la figura). El centro de masa se mueve a la velocidad v2 y ambos cuerpos se mueven hacia él a una velocidad v2 . Debido a la simetría, después de la colisión ambos deben alejarse del centro de masa a la misma velocidad. Añadiendo la velocidad del centro de masa a ambos, encontramos que el cuerpo que se estaba moviendo ahora está detenido y el otro se está alejando a una velocidad v. Los cuerpos han cambiado sus velocidades. Independientemente de las velocidades de los cuerpos, un cambio al marco del centro de masa nos lleva a la misma conclusión. Por lo tanto, las velocidades finales están dadas por

En general, cuando se conocen las velocidades iniciales, las velocidades finales están dadas por


Si un cuerpo tiene una masa mucho mayor que el otro, su velocidad se verá poco afectada por una colisión, mientras que el otro cuerpo experimentará un gran cambio.
Colisiones inelásticas
En una colisión inelástica, parte de la energía cinética de los cuerpos en colisión se convierte en otras formas de energía (como el sonido de heator). Los ejemplos incluyen colisiones de tráfico, en las que el efecto de la energía cinética perdida se puede ver en el daño a los vehículos; los electrones pierden parte de su energía en átomos (como en el experimento de Franck-Hertz); y aceleradores de partículas en los que la energía cinética se convierte en masa en forma de nuevas partículas.
En una colisión perfectamente inelástica (como un error que golpea un parabrisas), ambos cuerpos tienen el mismo movimiento después. Si un cuerpo está inmóvil para empezar, la ecuación para la conservación del impulso es

asi que

En un marco de referencia que se mueve a la velocidad v ) , los objetos son detenidos por la colisión y el 100% de la energía cinética se convierte en otras formas de energía.
Una medida de la inelasticidad de la colisión es el coeficiente de restitución C R , definido como la relación entre la velocidad relativa de separación y la velocidad relativa de aproximación. Al aplicar esta medida a una pelota que rebota desde una superficie sólida, esto se puede medir fácilmente usando la siguiente fórmula:

Las ecuaciones de momento y energía también se aplican a los movimientos de los objetos que comienzan juntos y luego se separan. Por ejemplo, una explosión es el resultado de una reacción en cadena que transforma la energía potencial almacenada en forma química, mecánica o nuclear en energía cinética, energía acústica y radiación electromagnética. Los cohetes también hacen uso de la conservación del impulso: el propulsor se empuja hacia afuera, ganando impulso, y se le imparte un impulso igual y opuesto al cohete.
Múltiples dimensiones
El movimiento real tiene dirección y velocidad y debe estar representado por un vector. En un sistema de coordenadas con ejes x , y , z , la velocidad tiene componentes v x en la dirección x , v y en la dirección y , v z en la dirección z . El vector está representado por un símbolo en negrita:

Del mismo modo, el momento es una cantidad vectorial y se representa con un símbolo en negrita:

Las ecuaciones en las secciones anteriores, funcionan en forma vectorial si los escalares p y v son reemplazados por los vectores p y v . Cada ecuación vectorial representa tres ecuaciones escalares. Por ejemplo,

representa tres ecuaciones:

Las ecuaciones de energía cinética son excepciones a la regla de reemplazo anterior. Las ecuaciones siguen siendo unidimensionales, pero cada escalar representa la magnitud del vector, por ejemplo,

Cada ecuación vectorial representa tres ecuaciones escalares. A menudo se pueden elegir coordenadas de modo que solo se necesiten dos componentes, como en la figura. Cada componente se puede obtener por separado y los resultados se combinan para producir un resultado vectorial.
Una construcción simple que involucra el centro del marco de masa puede usarse para mostrar que si una esfera elástica estacionaria es golpeada por una esfera en movimiento, las dos se alejarán en ángulos rectos después de la colisión (como en la figura).
Objetos de masa variable
El concepto de momento juega un papel fundamental en la explicación del comportamiento de los objetos de masa variable, como el combustible que expulsa cohetes o el gas acreedor de estrellas. Al analizar un objeto de este tipo, se trata la masa del objeto como una función que varía con el tiempo: m ( t ) . El impulso del objeto en el tiempo t es, por lo tanto, p ( t ) = m ( t ) v ( t ) . Entonces, uno podría intentar invocar la segunda ley de movimiento de Newton diciendo que la fuerza externa F sobre el objeto está relacionada con su momento p ( t ) con F = dpdt , pero esto es incorrecto, al igual que la expresión relacionada que se encuentra al aplicar la regla del producto a d ( mv )dt :
- (incorrecto)

Esta ecuación no describe correctamente el movimiento de los objetos de masa variable. La ecuación correcta es

donde u es la velocidad de la masa eyectada / acrecida como se ve en el marco de descanso del objeto . Esto es distinto de v , que es la velocidad del objeto mismo como se ve en un marco inercial.
Esta ecuación se deriva haciendo un seguimiento tanto del momento del objeto como del momento de la masa inyectada / acrecida ( dm ). Cuando se consideran juntos, el objeto y la masa ( dm ) constituyen un sistema cerrado en el que se conserva el impulso total.

Relativista
Invarianza de Lorentz
La física newtoniana supone que el tiempo y el espacio absolutos existen fuera de cualquier observador; esto da lugar a la invariancia de Galileo. También da como resultado una predicción de que la velocidad de la luz puede variar de un marco de referencia a otro. Esto es contrario a la observación. En la teoría especial de la relatividad, Einstein mantiene el postulado de que las ecuaciones de movimiento no dependen del marco de referencia, sino que supone que la velocidad de la luz c es invariante. Como resultado, la posición y el tiempo en dos marcos de referencia están relacionados por la transformación de Lorentz en lugar de la transformación de Galileo.
Considere, por ejemplo, un cuadro de referencia que se mueve en relación con otro a la velocidad v en la dirección x . La transformación de Galileo da las coordenadas del marco móvil como

mientras que la transformación de Lorentz da

donde γ es el factor de Lorentz:

La segunda ley de Newton, con la masa fija, no es invariante bajo una transformación de Lorentz. Sin embargo, puede hacerse invariable haciendo que la masa de inercia m de un objeto sea función de la velocidad:

m 0 es la masa invariante del objeto.
El impulso modificado,

obedece la segunda ley de Newton:

Dentro del dominio de la mecánica clásica, el momento relativista se aproxima mucho al momento Newtoniano: a baja velocidad, γm 0 v es aproximadamente igual a m 0 v , la expresión newtoniana para el impulso.
Formulación de cuatro vectores
En la teoría de la relatividad especial, las cantidades físicas se expresan en términos de cuatro vectores que incluyen el tiempo como una cuarta coordenada junto con las tres coordenadas espaciales. Estos vectores generalmente están representados por letras mayúsculas, por ejemplo, R por posición. La expresión para el cuatro-momento depende de cómo se expresan las coordenadas. El tiempo puede darse en sus unidades normales o multiplicarse por la velocidad de la luz para que todas las componentes de los cuatro vectores tengan dimensiones de longitud. Si se usa la última escala, un intervalo de tiempo apropiado, τ , definido por

es invariante en las transformaciones de Lorentz (en esta expresión y en lo que sigue se ha utilizado la firma métrica (+ - - -) , diferentes autores usan convenciones diferentes). Matemáticamente, esta invarianza se puede asegurar de una de dos maneras: tratando los cuatro vectores como vectores euclidianos y multiplicando el tiempo por
√
-1 ; o manteniendo el tiempo como una cantidad real e incrustando los vectores en un espacio de Minkowski. En un espacio de Minkowski, el producto escalar de dos vectores de cuatro U = ( U 0 , U 1 , U 2 , U 3 ) y V = ( V 0 , V1 , V 2 , V 3 ) se define como
√
-1 ; o manteniendo el tiempo como una cantidad real e incrustando los vectores en un espacio de Minkowski. En un espacio de Minkowski, el producto escalar de dos vectores de cuatro U = ( U 0 , U 1 , U 2 , U 3 ) y V = ( V 0 , V1 , V 2 , V 3 ) se define como

En todos los sistemas de coordenadas, la cuatro velocidades relativista (contravariante) se define por

y el (cuatro) momento (contravariante) es

donde m 0 es la masa invariante. Si R = ( ct, x, y, z ) (en el espacio de Minkowski), entonces

Usando la equivalencia de masa-energía de Einstein, E = mc , esto puede ser reescrito como

Por lo tanto, la conservación del cuatro-momento es Lorentz-invariante e implica la conservación de la masa y la energía.
La magnitud del impulso de cuatro vectores es igual a m 0 c :

y es invariante en todos los marcos de referencia.
La relación relativista energía-momento se mantiene incluso para partículas sin masa como fotones; estableciendo m 0 = 0 se deduce que

En un juego de "billar" relativista, si una partícula estacionaria es golpeada por una partícula en movimiento en una colisión elástica, las trayectorias formadas por las dos después formarán un ángulo agudo. Esto es diferente del caso no relativista en el que viajan en ángulos rectos.
El cuatro-momento de una onda plana se puede relacionar con una onda de cuatro vectores

Para una partícula, la relación entre las componentes temporales, E = ħ ω , es la relación de Planck-Einstein, y la relación entre las componentes espaciales, p = ħ k , describe una onda de materia de Broglie.
Generalizado
Las leyes de Newton pueden ser difíciles de aplicar a muchos tipos de movimiento porque el movimiento está limitado por restricciones . Por ejemplo, un talón en un ábaco se ve obligado a moverse a lo largo de su cable y un talud de péndulo se ve obligado a oscilar a una distancia fija del pivote. Muchas de estas limitaciones se pueden incorporar cambiando las coordenadas cartesianas normales a un conjunto de coordenadas generalizadas que pueden tener un número menor. Se han desarrollado métodos matemáticos refinados para resolver problemas mecánicos en coordenadas generalizadas. Introducen un impulso generalizado , también conocido como el impulso canónico o conjugado, que amplía los conceptos tanto de momento lineal como de momento angular. Para distinguirlo del impulso generalizado, el producto de masa y velocidad también se denomina impulso mecánico , cinético o cinemático . Los dos métodos principales se describen a continuación.
Mecánica lagrangiana
En la mecánica lagrangiana, un lagrangiano se define como la diferencia entre la energía cinética T y la energía potencial V :

Si las coordenadas generalizadas se representan como un vector q = ( q 1 , q 2 , ..., q N ) y la diferenciación del tiempo está representada por un punto sobre la variable, entonces las ecuaciones de movimiento (conocidas como Lagrange o Euler- Ecuaciones de Lagrange) son un conjunto de N ecuaciones:

Si una coordenada q i no es una coordenada cartesiana, la componente de momento generalizada asociada p i no tiene necesariamente las dimensiones de momento lineal. Incluso si q i es una coordenada cartesiana, p i no será lo mismo que el momento mecánico si el potencial depende de la velocidad. Algunas fuentes representan el momento cinemático con el símbolo Π .
En este marco matemático, un impulso generalizado está asociado con las coordenadas generalizadas. Sus componentes se definen como

Se dice que cada componente p j es el momento conjugado para la coordenada q j .
Ahora bien, si una coordenada dada q i no aparece en la lagrangiana (aunque podría aparecer su derivada en el tiempo), entonces

Esta es la generalización de la conservación del impulso.
Incluso si las coordenadas generalizadas son solo las coordenadas espaciales ordinarias, los momentos conjugados no son necesariamente las coordenadas de momento ordinarias. Un ejemplo se encuentra en la sección sobre electromagnetismo.
Mecánica hamiltoniana
En la mecánica hamiltoniana, el lagrangiano (una función de las coordenadas generalizadas y sus derivadas) es reemplazado por un hamiltoniano que es una función de las coordenadas generalizadas y el momento. El hamiltoniano se define como

donde el ímpetu se obtiene al diferenciar a Lagrangian como arriba. Las ecuaciones de movimiento de Hamilton son

Como en la mecánica de Lagrange, si una coordenada generalizada no aparece en el hamiltoniano, su componente conjugado de momento se conserva.
Simetría y conservación
La conservación del momento es una consecuencia matemática de la homogeneidad (simetría de cambio) del espacio (la posición en el espacio es la cantidad conjugada canónica al momento). Es decir, la conservación del impulso es una consecuencia del hecho de que las leyes de la física no dependen de la posición; este es un caso especial del teorema de Noether.
Electromagnético
Partícula en un campo
En las ecuaciones de Maxwell, las fuerzas entre partículas están mediadas por campos eléctricos y magnéticos. La fuerza electromagnética (fuerza de Lorentz ) en una partícula con carga q debido a una combinación de campo eléctrico E y campo magnético B es

(en unidades SI). Tiene un potencial eléctrico φ ( r , t ) y un potencial vectorial magnético A ( r , t ) . En el régimen no relativista, su impulso generalizado es

mientras que en la mecánica relativista esto se convierte

Conservación
En la mecánica newtoniana, la ley de conservación del impulso puede derivarse de la ley de acción y reacción, que establece que cada fuerza tiene una fuerza recíproca igual y opuesta. En algunas circunstancias, mover partículas cargadas puede ejercer fuerzas entre sí en direcciones no opuestas. Sin embargo, el momento combinado de las partículas y el campo electromagnético se conserva.
Vacío
La fuerza de Lorentz imparte un impulso a la partícula, por lo que según la segunda ley de Newton, la partícula debe impartir un impulso a los campos electromagnéticos.
En un vacío, el impulso por unidad de volumen es

donde μ 0 es la permeabilidad al vacío yc es la velocidad de la luz. La densidad de momento es proporcional a la Poynting vector S que da la tasa direccional de la transferencia de energía por unidad de área:

Si se quiere conservar el impulso sobre el volumen V sobre una región Q , los cambios en el momento de la materia a través de la fuerza de Lorentz deben equilibrarse con los cambios en el impulso del campo electromagnético y la salida de impulso. Si P mech es el impulso de todas las partículas en Q , y las partículas son tratados como un continuo, entonces la segunda ley de Newton da

El impulso electromagnético es

y la ecuación para la conservación de cada componente i del impulso es

El término de la derecha es una integral sobre la superficie Σ de la superficie σ que representa el flujo de impulso dentro y fuera del volumen, y n j es un componente de la superficie normal de S . La cantidad T ij se llama tensor de tensión Maxwell, definido como

Medios de comunicación
Los resultados anteriores son para los microscópicos ecuaciones de Maxwell, aplicable a las fuerzas electromagnéticas en el vacío (o en una escala muy pequeña en medios de comunicación). Es más difícil definir la densidad de momento en los medios porque la división en electromagnética y mecánica es arbitraria. La definición de densidad de impulso electromagnético se modifica para

donde el campo H H está relacionado con el campo B y la magnetización M por

El tensor de tensión electromagnética depende de las propiedades de los medios.
Mecánica cuántica
En la mecánica cuántica, el impulso se define como un operador autoadjunto en la función de onda. El principio de incertidumbre de Heisenberg define los límites sobre la precisión con que se puede conocer el momento y la posición de un único sistema observable a la vez. En la mecánica cuántica, la posición y el momento son variables conjugadas.
Para una sola partícula descrita en la base de posición, el operador de momento se puede escribir como

donde ∇ es el operador de gradiente, ħ es la constante de Planck reducida, y yo es la unidad imaginaria. Esta es una forma comúnmente encontrada del operador de momento, aunque el operador de momento en otras bases puede tomar otras formas. Por ejemplo, en el espacio de momento, el operador de momento se representa como

donde el operador p actúa sobre una función de onda ψ ( p ) cede esa función de onda multiplicada por el valor p , de forma análoga a la forma en que el operador de posición que actúa sobre una función de onda ψ ( x ) rinde esa función de onda multiplicada por la valor x .
Para objetos masivos y sin masa, el momento relativista está relacionado con la constante de fase por


La radiación electromagnética (incluida la luz visible, la luz ultravioleta y las ondas de radio) es transportada por los fotones. Aunque los fotones (el aspecto de la partícula de la luz) no tienen masa, todavía tienen impulso. Esto lleva a aplicaciones como la vela solar. El cálculo del impulso de la luz en los medios dieléctricos es un tanto controvertido (véase la controversia de Abraham-Minkowski).
En cuerpos y fluidos deformables
Conservación en un continuo
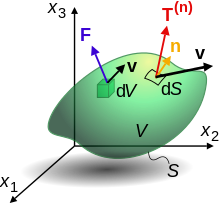
En campos como la dinámica de fluidos y la mecánica sólida, no es factible seguir el movimiento de átomos o moléculas individuales. En cambio, los materiales deben aproximarse mediante un continuo en el que haya una partícula o paquete de fluidos en cada punto al que se le asigna el promedio de las propiedades de los átomos en una pequeña región cercana. En particular, tiene una densidad ρ y velocidad v que dependen del tiempo t y de la posición r . El impulso por unidad de volumen es ρ v .
Considere una columna de agua en equilibrio hidrostático. Todas las fuerzas en el agua están en equilibrio y el agua está inmóvil. En cualquier gota de agua, dos fuerzas están equilibradas. El primero es la gravedad, que actúa directamente sobre cada átomo y molécula dentro. La fuerza gravitacional por unidad de volumen es ρ g , donde g es la aceleración de la gravedad. La segunda fuerza es la suma de todas las fuerzas ejercidas en su superficie por el agua circundante. La fuerza desde abajo es mayor que la fuerza desde arriba solo por la cantidad necesaria para equilibrar la gravedad. La fuerza normal por unidad de área es la presión p . La fuerza promedio por unidad de volumen dentro de la gota es el gradiente de la presión, por lo que la ecuación del balance de fuerzas es

Si las fuerzas no están balanceadas, la gota se acelera. Esta aceleración no es simplemente la derivada parcial ∂ v∂t porque el fluido en un volumen dado cambia con el tiempo. En cambio, se necesita la derivada material:

Aplicado a cualquier cantidad física, la derivada material incluye la tasa de cambio en un punto y los cambios debidos a la advección como fluido se llevan más allá del punto. Por unidad de volumen, la tasa de cambio en el momento es igual a ρ D vDt . Esto es igual a la fuerza neta en la gota.
Las fuerzas que pueden cambiar el impulso de una gota incluyen el gradiente de la presión y la gravedad, como se indicó anteriormente. Además, las fuerzas de superficie pueden deformar la gota. En el caso más simple, un esfuerzo cortante τ , ejercido por una fuerza paralela a la superficie de la gota, es proporcional a la velocidad de deformación o tasa de deformación. Tal esfuerzo cortante ocurre si el fluido tiene un gradiente de velocidad porque el fluido se mueve más rápido en un lado que en otro. Si la velocidad en la dirección x varía con z , la fuerza tangencial en la dirección x por unidad de área normal a la dirección z es

donde μ es la viscosidad. Esto también es un flujo, o flujo por área de unidad, de x-impulso a través de la superficie.
Incluyendo el efecto de la viscosidad, las ecuaciones de equilibrio de momento para el flujo incompresible de un fluido newtoniano son

Estas son conocidas como las ecuaciones de Navier-Stokes.
Las ecuaciones de equilibrio de momento se pueden extender a materiales más generales, incluidos los sólidos. Para cada superficie con normal en dirección iy fuerza en dirección j , existe una componente de tensión σ ij . Los nueve componentes componen el tensor de tensión de Cauchy σ, que incluye tanto la presión como la cizalladura. La conservación local del momento se expresa mediante la ecuación de momento de Cauchy:

donde f es la fuerza del cuerpo.
La ecuación de momento de Cauchy es ampliamente aplicable a las deformaciones de sólidos y líquidos. La relación entre las tensiones y la velocidad de deformación depende de las propiedades del material (ver Tipos de viscosidad).
Ondas acústicas
Una perturbación en un medio da lugar a oscilaciones, u ondas, que se propagan lejos de su fuente. En un fluido, pequeños cambios en la presión p a menudo se pueden describir mediante la ecuación de onda acústica:

donde c es la velocidad del sonido. En un sólido, se pueden obtener ecuaciones similares para la propagación de presión (ondas P) y cortante (ondas S).
El flujo, o transporte por área de unidad, de una componente de momento ρv j por una velocidad v i es igual a ρ v j v j . En la aproximación lineal que conduce a la ecuación acústica anterior, el promedio de tiempo de este flujo es cero. Sin embargo, los efectos no lineales pueden dar lugar a un promedio distinto de cero. Es posible que se produzca un flujo de impulso aunque la onda en sí no tenga un impulso medio.
Historia del concepto
Aproximadamente en 530 dC, trabajando en Alejandría, el filósofo bizantino John Philoponus desarrolló un concepto de impulso en su comentario a la Física de Aristóteles . Aristóteles afirmó que todo lo que se mueve debe mantenerse moviéndose por algo. Por ejemplo, una pelota lanzada debe mantenerse en movimiento mediante movimientos del aire. La mayoría de los escritores continuaron aceptando la teoría de Aristóteles hasta el tiempo de Galileo, pero algunos eran escépticos. Philoponus señaló el absurdo en la afirmación de Aristóteles de que el movimiento de un objeto es promovido por el mismo aire que resiste su paso. En cambio, propuso que se le impartiera un ímpetu al objeto en el acto de arrojarlo. Ibn Sīnā (también conocido por su nombre latinizado Avicenna) leyó Filoponus y publicó su propia teoría del movimiento en The Book of Healing en 1020. Estuvo de acuerdo en que el lanzador proporciona un ímpetu a un proyectil; pero a diferencia de Philoponus, que creía que era una virtud temporal que declinaría incluso en el vacío, la veía como una fuerza persistente que requería fuerzas externas como la resistencia del aire para disiparla. El trabajo de Philoponus, y posiblemente el de Ibn Sīnā, fue leído y refinado por los filósofos europeos Peter Olivi y Jean Buridan. Buridan, quien en aproximadamente 1350 fue nombrado rector de la Universidad de París, se refirió a que el ímpetu es proporcional al peso por la velocidad. Además, la teoría de Buridan era diferente de la de su predecesor en el sentido de que no consideraba que el ímpetu fuera autodestructivo, afirmando que un cuerpo sería arrestado por las fuerzas de la resistencia del aire y la gravedad que podrían oponerse a su ímpetu.
René Descartes creía que la "cantidad de movimiento" total (latín: quantitas motus ) en el universo se conserva, donde la cantidad de movimiento se entiende como el producto del tamaño y la velocidad. Esto no debe leerse como una afirmación de la ley moderna del impulso, ya que no tenía ningún concepto de masa como distinto del peso y el tamaño, y lo más importante, creía que se conserva la velocidad en lugar de la velocidad. Entonces, para Descartes, si un objeto en movimiento rebotara en una superficie, cambiando su dirección pero no su velocidad, no habría ningún cambio en su cantidad de movimiento. Galileo, en sus Dos nuevas ciencias , usó la palabra italiana impeto para describir de manera similar la cantidad de movimiento de Descarte.
Leibniz, en su "Discurso sobre metafísica", presentó un argumento en contra de la construcción de Descartes de la conservación de la "cantidad de movimiento" usando un ejemplo de bloques de diferentes distancias de diferentes tamaños. Señala que la fuerza se conserva, pero la cantidad de movimiento, interpretada como el producto del tamaño y la velocidad de un objeto, no se conserva.
La primera declaración correcta de la ley de conservación del impulso fue realizada por el matemático inglés John Wallis en su obra de 1670, Mechanica sive De Motu, Tractatus Geometricus: "el estado inicial del cuerpo, ya sea de reposo o de movimiento, persistirá" y " Si la fuerza es mayor que la resistencia, se producirá movimiento ". Wallis usa el impulso y vis por la fuerza. La Philosophiæ Naturalis Principia Mathematica de Newton , cuando se publicó por primera vez en 1687, mostró un uso similar de palabras para el impulso matemático. Su definición II define quantitas motus, "cantidad de movimiento", como "que surge de la velocidad y cantidad de materia conjuntamente", que lo identifica como momento. Así, cuando en la Ley II se refiere a mutatio motus , "cambio de movimiento", que es proporcional a la fuerza impresa, generalmente se considera que significa impulso y no movimiento. Solo restaba asignar un término estándar a la cantidad de movimiento. El primer uso del "impulso" en su sentido matemático no está claro, pero en el momento de la Miscelánea de Jenning en 1721, cinco años antes de la edición final de los Principia Mathematica de Newton , el momento M o "cantidad de movimiento" se definía para los estudiantes "un rectángulo", es "cantidad de material" y V es "velocidad", st .