Plano (Geometria)
Definición
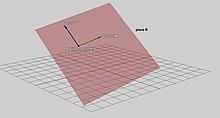
En matemáticas, un plano es una superficie plana y bidimensional que se extiende infinitamente lejos. Un plano es el análogo bidimensional de un punto (dimensiones cero), una línea (una dimensión) y espacio tridimensional. Los planos pueden surgir como subespacios de algún espacio de dimensiones superiores, como las paredes de una sala extendidas infinitamente lejos, o pueden disfrutar de una existencia independiente por derecho propio, como en el entorno de la geometría euclidiana.
Cuando se trabaja exclusivamente en el espacio euclidiano bidimensional, se utiliza el artículo definido, por lo tanto, el plano se refiere a todo el espacio. Muchas tareas fundamentales en matemáticas, geometría, trigonometría, teoría de grafos y gráficos se llevan a cabo en un espacio bidimensional o, en otras palabras, en el plano.
Geometría euclidiana
Euclides estableció el primer gran hito del pensamiento matemático, un tratamiento axiomático de la geometría. Él seleccionó un pequeño núcleo de términos indefinidos (llamados nociones comunes ) y postulados (o axiomas) que luego utilizó para probar varios enunciados geométricos. Aunque el plano, en su sentido moderno, no recibe una definición directa en ningún lugar de los Elementos , puede considerarse parte de las nociones comunes. Euclid nunca usó números para medir longitud, ángulo o área. De esta forma, el plano euclidiano no es exactamente el mismo que el plano cartesiano.

Un plano es una superficie gobernada.
Planos incrustados en el espacio euclidiano tridimensional
Esta sección se refiere únicamente a los planos incrustados en tres dimensiones: Específicamente, en R .
Determinación por puntos y líneas contenidos
En un espacio euclidiano de cualquier cantidad de dimensiones, un plano se determina de forma única por cualquiera de los siguientes:
- Tres puntos no colineales (puntos que no están en una sola línea).
- Una línea y un punto que no están en esa línea.
- Dos líneas distintas pero que se entrecruzan.
- Dos líneas paralelas.
Propiedades
Las siguientes afirmaciones se mantienen en el espacio euclidiano tridimensional, pero no en dimensiones más altas, aunque tienen análogos de dimensiones superiores:
- Dos planos distintos son paralelos o se cruzan en una línea.
- Una línea es paralela a un plano, la interseca en un solo punto o está contenida en el plano.
- Dos líneas distintas perpendiculares al mismo plano deben ser paralelas entre sí.
- Dos planos distintos perpendiculares a la misma línea deben ser paralelos entre sí.
Forma punto-normal y forma general de la ecuación de un plano
De una manera análoga a la forma en que se describen las líneas en un espacio bidimensional usando una forma de pendiente de punto para sus ecuaciones, los planos en un espacio tridimensional tienen una descripción natural usando un punto en el plano y un vector ortogonal a él (el vector normal) para indicar su "inclinación".
Específicamente, sea r 0 el vector de posición de algún punto P 0 = ( x 0 , y 0 , z 0 ) , y sea n = ( a , b , c ) un vector distinto de cero. El plano determinado por el punto P 0 y el vector n consiste en esos puntos P , con el vector de posición r , tal que el vector dibujado desde P 0 a P es perpendicular a n. Recordando que dos vectores son perpendiculares si y solo si su producto escalar es cero, se deduce que el plano deseado se puede describir como el conjunto de todos los puntos r tales que

(El punto aquí significa un producto de punto (escalar). Ampliado esto se convierte

que es la forma punto-normal de la ecuación de un plano. Esta es solo una ecuación lineal

dónde

Por el contrario, se muestra fácilmente que si a , b , c y d son constantes y a , b y c no son todos cero, entonces el gráfico de la ecuación
es un plano que tiene el vector n = ( a , b , c ) como una normal. Esta ecuación familiar para un plano se llama la forma general de la ecuación del plano.
Así, por ejemplo, una ecuación de regresión de la forma y = d + ax + cz (con b = -1 ) establece un plano de mejor ajuste en el espacio tridimensional cuando existen dos variables explicativas.
Describiendo un plano con un punto y dos vectores sobre él
Alternativamente, un plano se puede describir paramétricamente como el conjunto de todos los puntos de la forma

donde s y t abarcan todos los números reales, v y w reciben vectores linealmente independientes que definen el plano, y r 0 es el vector que representa la posición de un punto arbitrario (pero fijo) en el plano. Los vectores v y w se pueden visualizar como vectores que comienzan en r 0 y apuntan en diferentes direcciones a lo largo del plano. Tenga en cuenta que v y w pueden ser perpendiculares, pero no pueden ser paralelos.
Describiendo un plano a través de tres puntos
Deje p 1 = (x 1 , y 1 , z 1 ) , p 2 = (x 2 , y 2 , z 2 ) , y p 3 = (x 3 , y 3 , z 3 ) ser puntos no colineales.
Método 1
El plano que pasa por p 1 , p 2 y p 3 se puede describir como el conjunto de todos los puntos (x, y, z) que satisfacen las siguientes ecuaciones determinantes:

Método 2
Para describir el plano mediante una ecuación de la forma , resuelve el siguiente sistema de ecuaciones:




Este sistema se puede resolver usando la regla de Cramer y las manipulaciones básicas de la matriz. Dejar
- .

Si D es distinto de cero (por lo que para planos no pasan por el origen) los valores para un , b y c se puede calcular como sigue:



Estas ecuaciones son paramétricas en d . Al establecer d igual a cualquier número distinto de cero y al sustituirlo en estas ecuaciones, se obtendrá un conjunto de soluciones.
Método 3
Este plano también se puede describir con la prescripción de "punto y vector normal" anterior. Un vector normal adecuado es dado por el producto cruzado

y el punto r 0 se puede tomar como cualquiera de los puntos dados p 1 , p 2 o p 3 (o cualquier otro punto en el plano).
Distancia desde un punto a un plano
Para un plano y un punto que no necesariamente se encuentran en el plano, la distancia más corta desde el plano es




Se deduce que se encuentra en el plano si y solo si D = 0 .
Si quiere decir que a , b , y c están normalizados, entonces la ecuación se vuelve


Otra forma de vector para la ecuación de un plano, conocida como la forma normal Hesse se basa en el parámetro D . Esta forma es:

donde es un vector unitario normal al plano, un vector de posición de un punto del plano y D 0 la distancia del plano al origen.


La fórmula general para las dimensiones más altas se puede llegar rápidamente utilizando la notación vectorial. Deje que el hiperplano tenga una ecuación , donde el es un vector normal y es un vector de posición a un punto en el hiperplano. Deseamos la distancia perpendicular al punto . El hiperplano también puede estar representado por la ecuación escalar , para constantes . Del mismo modo, un correspondiente se puede representar como . Deseamos la proyección escalar del vector en la dirección de . Observando que (como satisface la ecuación del hiperplano) tenemos









- .

Línea de intersección entre dos planos
La línea de intersección entre dos planos y donde están normalizados viene dada por




dónde


Esto se encuentra al notar que la línea debe ser perpendicular a ambas normales planas, y de forma paralela a su producto cruzado (este producto cruzado es cero si y solo si los planos son paralelos, y por lo tanto no se cruzan o son completamente coincidentes).

El resto de la expresión se obtiene al encontrar un punto arbitrario en la línea. Para hacerlo, considere que cualquier punto en el espacio puede escribirse como , ya que es una base. Deseamos encontrar un punto que esté en ambos planos (es decir, en su intersección), así que inserte esta ecuación en cada una de las ecuaciones de los planos para obtener dos ecuaciones simultáneas que pueden ser resueltas por y .




Si además asumimos eso y somos ortonormales, entonces el punto más cercano en la línea de intersección al origen es . Si ese no es el caso, entonces se debe usar un procedimiento más complejo.



Ángulo diedro
Dado dos planos intersecantes descritos por y , el ángulo diedro entre ellos se define como el ángulo entre sus direcciones normales:




Planos en varias áreas de las matemáticas
Además de su estructura geométrica familiar, con isomorfismos que son isometries con respecto al producto interno habitual, el plano se puede ver en varios otros niveles de abstracción. Cada nivel de abstracción corresponde a una categoría específica.
En un extremo, todos los conceptos geométricos y métricos pueden abandonarse para abandonar el plano topológico, que puede considerarse como una lámina de goma infinita idealmente trivial y homotópicamente, que conserva una noción de proximidad, pero no tiene distancias. El plano topológico tiene un concepto de trayectoria lineal, pero no el concepto de una línea recta. El plano topológico, o su equivalente, el disco abierto, es el vecindario topológico básico utilizado para construir superficies (o 2-variedades) clasificadas en topología de baja dimensionalidad. Los isomorfismos del plano topológico son todas biyecciones continuas. El plano topológico es el contexto natural para la rama de la teoría de grafos que trata con gráficos planos y resultados como el teorema de los cuatro colores.
El plano también se puede ver como un espacio afín, cuyos isomorfismos son combinaciones de traducciones y mapas lineales no singulares. Desde este punto de vista no hay distancias, pero se conservan la colinealidad y las proporciones de distancias en cualquier línea.
La geometría diferencial ve un plano como un colector real bidimensional, un plano topológico provisto de una estructura diferencial. De nuevo, en este caso, no existe una noción de distancia, pero ahora existe un concepto de suavidad de los mapas, por ejemplo, una ruta diferenciable o fluida (dependiendo del tipo de estructura diferencial aplicada). Los isomorfismos en este caso son biyecciones con el grado de diferenciabilidad elegido.
En la dirección opuesta a la abstracción, podemos aplicar una estructura de campo compatible al plano geométrico, dando lugar al plano complejo y al área principal del análisis complejo. El campo complejo tiene solo dos isomorfismos que dejan fija la línea real, la identidad y la conjugación.
De la misma manera que en el caso real, el plano también puede verse como la variedad compleja más simple, unidimensional (sobre los números complejos), a veces llamada línea compleja. Sin embargo, este punto de vista contrasta fuertemente con el caso del plano como una variedad real bidimensional. Los isomorfismos son biyecciones conformales del plano complejo, pero las únicas posibilidades son mapas que corresponden a la composición de una multiplicación por un número complejo y una traducción.
Además, la geometría euclidiana (que tiene curvatura cero en todas partes) no es la única geometría que el plano puede tener. El plano puede recibir una geometría esférica utilizando la proyección estereográfica. Esto se puede considerar como colocar una esfera en el plano (como una pelota en el piso), quitar el punto superior y proyectar la esfera sobre el plano desde este punto). Esta es una de las proyecciones que se pueden usar para hacer un mapa plano de parte de la superficie de la Tierra. La geometría resultante tiene una curvatura positiva constante.
Alternativamente, al plano también se le puede dar una métrica que le da una curvatura negativa constante dando el plano hiperbólico. La última posibilidad encuentra una aplicación en la teoría de la relatividad especial en el caso simplificado donde hay dos dimensiones espaciales y una dimensión temporal. (El plano hiperbólico es una hipersuperficie temporal en el espacio tridimensional de Minkowski).
Nociones geométricas topológicas y diferenciales
La compactación de un punto del plano es homeomorfa a una esfera (ver proyección estereográfica); el disco abierto es homeomorfo a una esfera con el "polo norte" ausente; agregar ese punto completa la esfera (compacta). El resultado de esta compactación es una variedad conocida como la esfera de Riemann o la compleja línea proyectiva. La proyección del plano euclidiano a una esfera sin un punto es un difeomorfismo e incluso un mapa conforme.
El plano en sí es homeomorfo (y diffeomorfo) a un disco abierto. Para el plano hiperbólico, tal diffeomorfismo es conforme, pero para el plano euclidiano no lo es.