Sistema coordinado
Definición
En geometría, un sistema de coordenadas es un sistema que usa uno o más números, o coordenadas , para determinar de manera única la posición de los puntos u otros elementos geométricos en un colector, como el espacio euclidiano. El orden de las coordenadas es significativo, y a veces se identifican por su posición en una tupla ordenada y, a veces, por una letra, como en "la coordenada x ". Las coordenadas se toman como números reales en matemáticas elementales, pero pueden ser números complejos o elementos de un sistema más abstracto, como un anillo conmutativo. El uso de un sistema de coordenadas permite que los problemas de geometría se traduzcan en problemas de números y viceversa ; esta es la base de la geometría analítica.
Contenido
- Sistemas de coordenadas comunes
- Numero de linea
- sistema de coordenadas Cartesianas
- Sistema de coordenadas polares
- Sistemas de coordenadas cilíndricas y esféricas
- Sistema de coordenadas homogéneo
- Otros sistemas comúnmente utilizados
- Coordenadas de objetos geométricos
- Transformaciones
- Líneas de coordenadas / curvas y planos / superficies
- Mapas de coordenadas
- Coordenadas orientadas
- Sistemas de coordenadas relativistas
Sistemas de coordenadas comunes
Numero de linea
El ejemplo más simple de un sistema de coordenadas es la identificación de puntos en una línea con números reales usando la recta numérica . En este sistema, se elige un punto arbitrario O (el origen ) en una línea determinada. La coordenada de un punto P se define como la distancia con signo de O a P , donde la distancia con signo es la distancia tomada como positiva o negativa dependiendo de qué lado de la línea P se encuentra. Cada punto recibe una coordenada única y cada número real es la coordenada de un punto único.

sistema de coordenadas Cartesianas

El ejemplo prototípico de un sistema de coordenadas es el sistema de coordenadas cartesianas. En el plano, se eligen dos líneas perpendiculares y las coordenadas de un punto se toman como las distancias firmadas a las líneas.
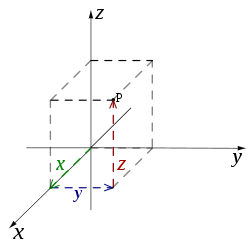
En tres dimensiones, se eligen tres planos perpendiculares y las tres coordenadas de un punto son las distancias firmadas para cada uno de los planos. Esto se puede generalizar para crear n coordenadas para cualquier punto en el espacio euclidiano n-dimensional.
Según la dirección y el orden del eje de coordenadas, el sistema puede ser un sistema de mano derecha o de mano izquierda. Este es uno de los muchos sistemas de coordenadas.
Sistema de coordenadas polares
Otro sistema de coordenadas común para el avión es el sistema de coordenadas polares . Un punto se elige como el polo y un rayo de este punto se toma como el eje polar . Para un ángulo dado θ, hay una sola línea a través del polo cuyo ángulo con el eje polar es θ (medido en sentido antihorario desde el eje hasta la línea). Luego hay un punto único en esta línea cuya distancia de inicio desde el origen es r para el número dado r . Para un par dado de coordenadas ( r , θ) hay un solo punto, pero cualquier punto está representado por muchos pares de coordenadas. Por ejemplo, ( r , θ), ( r , θ + 2π) y (- r, θ + π) son todas coordenadas polares para el mismo punto. El polo está representado por (0, θ) para cualquier valor de θ.
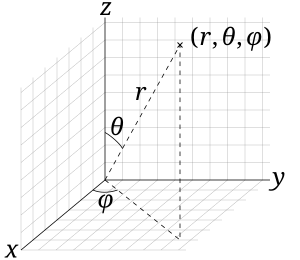
Sistemas de coordenadas cilíndricas y esféricas
Hay dos métodos comunes para extender el sistema de coordenadas polares a tres dimensiones. En el sistema de coordenadas cilíndricas , una z se añade coordenada con el mismo significado que en coordenadas cartesianas a la r y theta coordenadas polares que dan un triple ( r , θ , z ). Las coordenadas esféricas llevan esto un paso más adelante al convertir el par de coordenadas cilíndricas ( r , z ) en coordenadas polares ( ρ , φ ) dando un triple ( ρ , θ , φ ).
Sistema de coordenadas homogéneo
Un punto en el plano puede ser representado en coordenadas homogéneas por un triple ( x , y , z ), donde x / z y y / z son las coordenadas cartesianas del punto. Esto introduce una coordenada "extra", ya que solo se necesitan dos para especificar un punto en el plano, pero este sistema es útil porque representa cualquier punto en el plano proyectivo sin el uso de infinito. En general, un sistema de coordenadas homogéneo es aquel en el que solo las relaciones de las coordenadas son significativas y no los valores reales.
Otros sistemas comúnmente utilizados
Algunos otros sistemas de coordenadas comunes son los siguientes:
- Las coordenadas curvilíneas son una generalización de los sistemas de coordenadas en general; el sistema se basa en la intersección de curvas.
- Coordenadas ortogonales: las superficies coordinadas se encuentran en ángulo recto
- Coordenadas oblicuas: las superficies de coordenadas no son ortogonales
- El sistema de coordenadas log-polar representa un punto en el plano por el logaritmo de la distancia desde el origen y un ángulo medido desde una línea de referencia que se cruza con el origen.
- Las coordenadas de Plücker son una forma de representar líneas en el espacio euclidiano 3D utilizando seis tuplas de números como coordenadas homogéneas.
- Las coordenadas generalizadas se utilizan en el tratamiento lagrangiano de la mecánica.
- Las coordenadas canónicas se usan en el tratamiento hamiltoniano de la mecánica.
- Las coordenadas bicéntricas como se usan para los diagramas ternarios y más generalmente en el análisis de triángulos.
- Las coordenadas trilineales se usan en el contexto de triángulos.
Hay formas de describir curvas sin coordenadas, usando ecuaciones intrínsecas que usan cantidades invariables como la curvatura y la longitud del arco. Éstas incluyen:
- La ecuación de Whewell relaciona la longitud del arco y el ángulo tangencial.
- La ecuación de Cesàro relaciona la longitud del arco y la curvatura.
Coordenadas de objetos geométricos
Los sistemas de coordenadas a menudo se usan para especificar la posición de un punto, pero también se pueden usar para especificar la posición de figuras más complejas como líneas, planos, círculos o esferas. Por ejemplo, las coordenadas de Plücker se utilizan para determinar la posición de una línea en el espacio. Cuando es necesario, el tipo de figura que se describe se usa para distinguir el tipo de sistema de coordenadas, por ejemplo, el término coordenadas de línea se usa para cualquier sistema de coordenadas que especifique la posición de una línea.
Puede ocurrir que los sistemas de coordenadas para dos conjuntos diferentes de figuras geométricas sean equivalentes en términos de su análisis. Un ejemplo de esto son los sistemas de coordenadas homogéneas para puntos y líneas en el plano proyectivo. Se dice que los dos sistemas en un caso como este son dualistas . Los sistemas dualistas tienen la propiedad de que los resultados de un sistema pueden trasladarse al otro ya que estos resultados son solo interpretaciones diferentes del mismo resultado analítico; esto se conoce como el principio de la dualidad .
Transformaciones
Debido a que a menudo hay muchos sistemas de coordenadas posibles diferentes para describir figuras geométricas, es importante entender cómo se relacionan. Tales relaciones se describen mediante transformaciones de coordenadas que dan fórmulas para las coordenadas en un sistema en términos de las coordenadas en otro sistema. Por ejemplo, en el plano, si las coordenadas cartesianas ( x , y ) y las coordenadas polares ( r , θ ) tienen el mismo origen, y el eje polar es el eje xpositivo , la transformación de coordenadas de coordenadas polares a coordenadas cartesianas está dada por x = r cos θ y y = rsin θ .
Con cada biyección desde el espacio a sí mismo, se pueden asociar dos transformaciones de coordenadas:
- de modo que las nuevas coordenadas de la imagen de cada punto son las mismas que las coordenadas antiguas del punto original (las fórmulas para el mapeo son las inversas de las de la transformación de coordenadas)
- de modo que las coordenadas antiguas de la imagen de cada punto son las mismas que las nuevas coordenadas del punto original (las fórmulas para el mapeo son las mismas que las de la transformación de coordenadas)
Por ejemplo, en 1D, si el mapeo es una traducción de 3 a la derecha, el primero mueve el origen de 0 a 3, de modo que la coordenada de cada punto se vuelve 3 menos, mientras que el segundo mueve el origen de 0 a -3 , de modo que la coordenada de cada punto se convierta en 3 más.
Líneas de coordenadas / curvas y planos / superficies
En dos dimensiones, si una de las coordenadas en un sistema de coordenadas de punto se mantiene constante y se permite que la otra coordenada varíe, entonces la curva resultante se denomina curva de coordenadas . En el sistema de coordenadas cartesianas, las curvas de coordenadas son, de hecho, líneas rectas, por lo tanto, líneas de coordenadas . Específicamente, son las líneas paralelas a uno de los ejes de coordenadas. Para otros sistemas de coordenadas, las curvas de coordenadas pueden ser curvas generales. Por ejemplo, las curvas de coordenadas en coordenadas polares obtenidas al sostener rconstante son los círculos con centro en el origen. Los sistemas de coordenadas para el espacio euclidiano que no sean el sistema de coordenadas cartesianas se denominan sistemas de coordenadas curvilíneas. Este procedimiento no siempre tiene sentido, por ejemplo, no hay curvas de coordenadas en un sistema de coordenadas homogéneo.

En el espacio tridimensional, si una coordenada se mantiene constante y las otras dos pueden variar, la superficie resultante se denomina superficie de coordenadas . Por ejemplo, las superficies de coordenadas obtenidas manteniendo ρ constante en el sistema de coordenadas esféricas son las esferas con centro en el origen. En el espacio tridimensional, la intersección de dos superficies de coordenadas es una curva de coordenadas. En el sistema de coordenadas cartesianas podemos hablar de planos de coordenadas .
De forma similar, las hipersuperficies de coordenadas son los espacios ( n - 1) -dimensionales que resultan de la fijación de una sola coordenada de un sistema de coordenadas n- dimensional.
Mapas de coordenadas
El concepto de un mapa de coordenadas , o cuadro de coordenadas es central para la teoría de las variedades. Un mapa de coordenadas es esencialmente un sistema de coordenadas para un subconjunto de un espacio dado con la propiedad de que cada punto tiene exactamente un conjunto de coordenadas. Más precisamente, un mapa de coordenadas es un homeomorfismo de un subconjunto abierto de un espacio X a un subconjunto abierto de R . A menudo no es posible proporcionar un sistema de coordenadas consistente para un espacio completo. En este caso, se junta una colección de mapas de coordenadas para formar un atlas que cubre el espacio. Un espacio equipado con un atlas de este tipo se llama colectory se puede definir una estructura adicional en un colector si la estructura es consistente donde los mapas de coordenadas se superponen. Por ejemplo, una variedad diferenciable es una variedad donde el cambio de coordenadas de un mapa de coordenadas a otro es siempre una función diferenciable.
Coordenadas orientadas
En geometría y cinemática, los sistemas de coordenadas se usan no solo para describir la posición (lineal) de los puntos, sino también para describir la posición angular de los ejes, planos y cuerpos rígidos. En este último caso, la orientación de un segundo sistema de coordenadas (normalmente denominado "local"), fijado al nodo, se define en función del primer sistema de coordenadas (generalmente denominado "global" o "mundial"). Por ejemplo, la orientación de un cuerpo rígido puede representarse mediante una matriz de orientación, que incluye, en sus tres columnas, las coordenadas cartesianas de tres puntos. Estos puntos se utilizan para definir la orientación de los ejes del sistema local; son las puntas de tres vectores unitarios alineados con esos ejes.
Obtenido de: https://en.wikipedia.org/wiki/Coordinate_system